需求:在一个3d游戏中,因为y轴不移动可以抽象为二维平面。物体A在匀速直线移动,B发射一发子弹打中它,请问B发射角度怎么计算?已知:A的初始位置(即B发射子弹前一刻的位置)、B发射的子弹速度和位置、A移动的移动方向与速度。
酬劳:1K
联系qq:2043975351

需求:在一个3d游戏中,因为y轴不移动可以抽象为二维平面。物体A在匀速直线移动,B发射一发子弹打中它,请问B发射角度怎么计算?已知:A的初始位置(即B发射子弹前一刻的位置)、B发射的子弹速度和位置、A移动的移动方向与速度。
酬劳:1K
联系qq:2043975351
没听太明白,能否理解为 两点间连线 与X轴正方向之间的夹角呢?
理解下来就是一个求三角形的问题,a的角度是固定,时间一致在路径上相遇,然后就求角度。就一个方法,问问deepseek应该就出来了
感觉提问者 可能是要确保b发射的子弹打中移动中的a 根据a的移动速度和方向去计算提前命中角度
在二维平面中,B要计算发射角度θ以使子弹击中匀速直线运动的A,步骤如下:
参数定义:
相对位置差:
[
\Delta x = A_{0x} - B_x, \quad \Delta y = A_{0y} - B_y
]
构造二次方程:
[
a = v_b^2 - (v_{ax}^2 + v_{ay}^2)
]
[
b = -2(\Delta x \cdot v_{ax} + \Delta y \cdot v_{ay})
]
[
c = -(\Delta x^2 + \Delta y^2)
]
方程为:( a t^2 + b t + c = 0 )
求解时间t:
计算判别式 ( D = b^2 - 4ac )。若 ( D < 0 ),无解;否则解为:
[
t = \frac{-b \pm \sqrt{D}}{2a}
]
选择正实数解中最小的( t )。
计算角度θ:
当存在有效( t )时,目标点相对B的位置为:
[
(X, Y) = (\Delta x + v_{ax}t, \Delta y + v_{ay}t)
]
发射角度θ为:
[
\theta = \arctan\left(\frac{Y}{X}\right) = \arctan\left( \frac{\Delta y + v_{ay}t}{\Delta x + v_{ax}t} \right)
]
需使用反正切函数考虑象限,如arctan2(Y, X)。
公式总结:
答案:
发射角度θ需满足:
[
\theta = \arctan\left( \frac{A_{0y} - B_y + v_{ay}t}{A_{0x} - B_x + v_{ax}t} \right)
]
其中t为方程( (v_b^2 - V_a^2)t^2 - 2(\Delta \vec{r} \cdot \vec{v}_a)t - |\Delta \vec{r}|^2 = 0 )的最小正实根,Δr为A相对B的初始位置向量。若无实根则无法命中。
deepseek的答案
这游戏我做过,搜索《坦克3v3》
本人高中生,看见帖子觉得很有意思,这就是高中物理题嘛
我觉得,让B的速度角度始终朝向A,是不是就可以呢
如果想让B的速度角度自从发射之后一直都不变,那就要用物理公式,提前算出二者碰撞的位置,提前算出B的速度(矢量)满足什么条件的时候,会正好和移动中的A碰撞
真的蛮有意思的耶,感觉可以直接拿来当成高中物理题做了
漏条件了?b点到a方向射线 明显有无穷解
说的就是这个,初中应该有这类似的题目,就是变种的相遇问题
构造二次方程这个没看懂,能解释下吗? 为何这样构造?
DS给出的代码
interface Vector2 {
x: number;
y: number;
}
function calculateShootAngle(
aPos: Vector2, // A的初始位置
bPos: Vector2, // B的位置
aVelocity: Vector2, // A的速度向量
bulletSpeed: number // 子弹速度
): number {
// 1. 计算相对位置
const relativePos = {
x: aPos.x - bPos.x,
y: aPos.y - bPos.y
};
// 2. 计算相对速度(A的速度,因为B静止)
const relativeVel = aVelocity;
// 3. 计算需要解的一元二次方程
const a = relativeVel.x * relativeVel.x + relativeVel.y * relativeVel.y - bulletSpeed * bulletSpeed;
const b = 2 * (relativePos.x * relativeVel.x + relativePos.y * relativeVel.y);
const c = relativePos.x * relativePos.x + relativePos.y * relativePos.y;
// 4. 解方程求时间t
const discriminant = b * b - 4 * a * c;
if (discriminant < 0) {
// 无解,无法命中
return NaN;
}
const t1 = (-b + Math.sqrt(discriminant)) / (2 * a);
const t2 = (-b - Math.sqrt(discriminant)) / (2 * a);
const t = Math.max(t1, t2); // 取较大的正数解
// 5. 计算目标点
const targetPos = {
x: aPos.x + aVelocity.x * t,
y: aPos.y + aVelocity.y * t
};
// 6. 计算发射方向
const direction = {
x: targetPos.x - bPos.x,
y: targetPos.y - bPos.y
};
// 7. 返回角度(弧度)
return Math.atan2(direction.y, direction.x);
}
使用实例
const aPos = {x: 100, y: 50};
const bPos = {x: 0, y: 0};
const aVelocity = {x: 10, y: 5};
const bulletSpeed = 20;
const angle = calculateShootAngle(aPos, bPos, aVelocity, bulletSpeed);
if (isNaN(angle)) {
console.log(“无法命中目标”);
} else {
console.log(“发射角度(弧度):”, angle);
console.log(“发射角度(度):”, angle * 180 / Math.PI);
}
ai的推导过程,还是跳步了,跳过了最重要的二次方程的产生
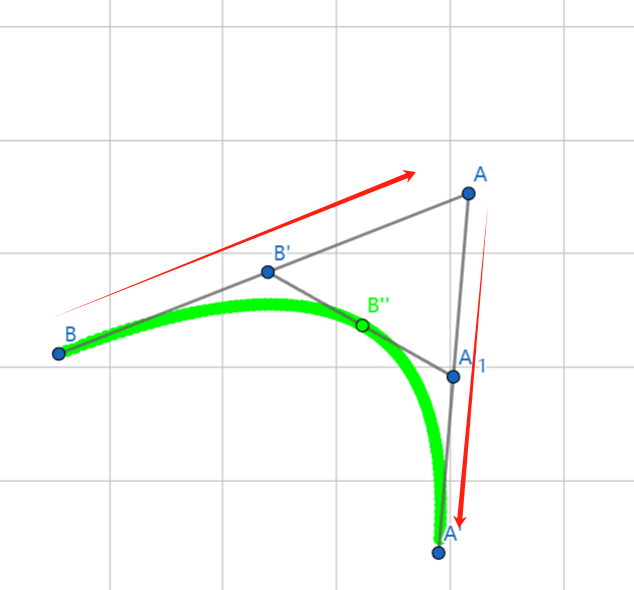
B的发射向量 v = 交点 - B起点