
你有没有学过什么叫后处理,初始路径是初始路径,后处理是后处理,后处理包括最常见的去重,双指针减枝,可能性拐点添加,或者更激进的排列组合
openList是待检测的列表,每次深度搜索都从里面查找出一个更有优的检测点用于判断有没有达到终点。你故作高深什么。
我不是说的容易,我测了百万次的所有点位地图路径,有没有问题我不清楚?
不说很多,你可以在手机跑一下我的寻路,看卡不卡,在跑一下你的寻路,遇到大死胡同时看看效果如何。
跟你这样故作高深的人真的没必要聊太多。
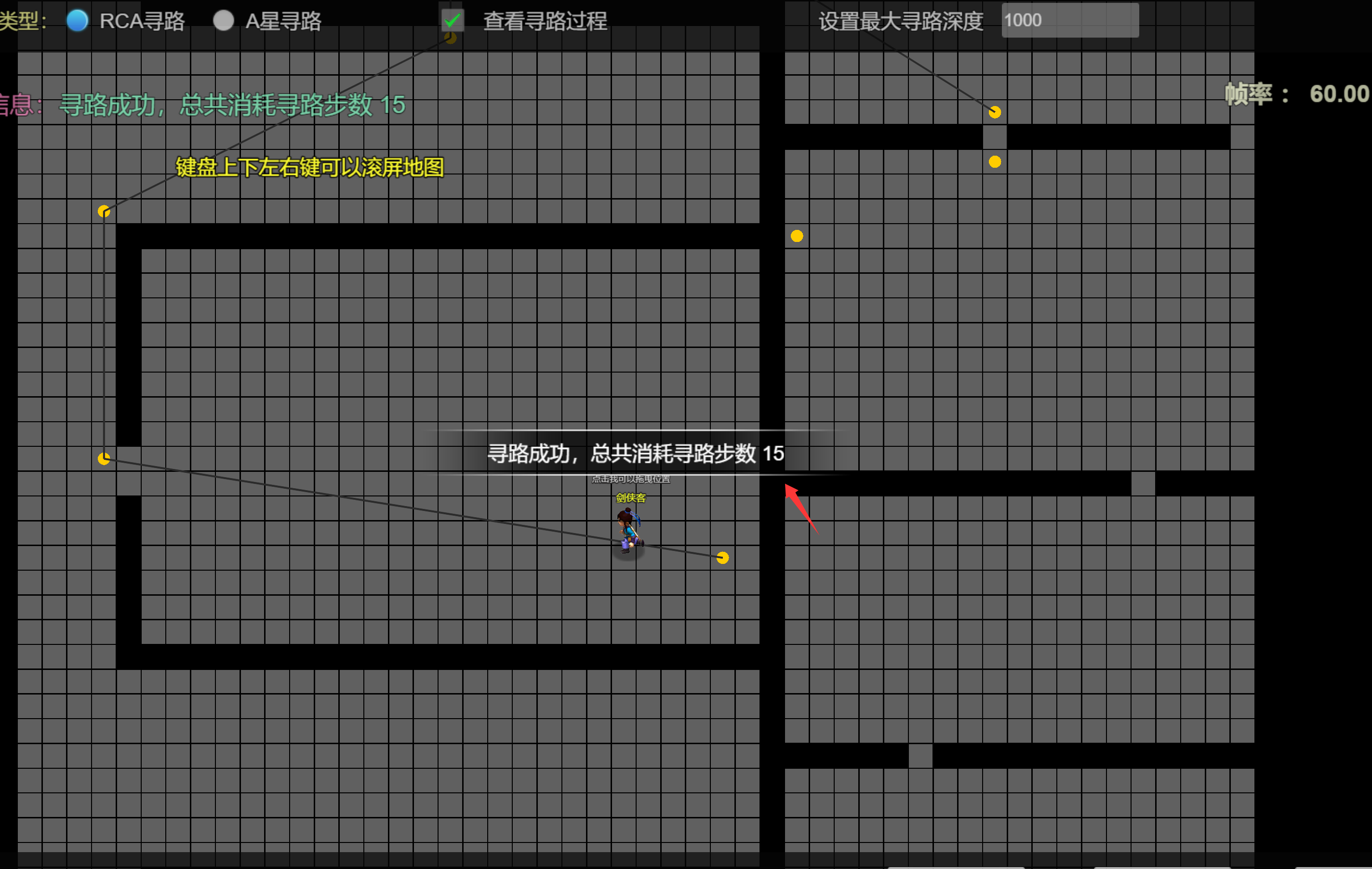
我的寻路案例都以动画演示的方式展示给你了,遇到死胡同可以轻易逃脱,其它复杂的地形也能随心所欲。
别谈太多故作高深的东西,寻路这些功能就是用在实际应用的。我写的寻路没什么问题,对付10000以上的格子也是轻松搞定。
那你知不知道什么叫openlist对称性,你的死胡同再弯弯绕绕,我openlist检索的路径最多也就是这个死胡同所有格的1/4,这还是刻意设计出来的情况,我说了,你死胡同再多,A星检索的也就是系数2.5 * 5/100 * 格子总数 * 根号2,这个系数还是刻意设计出来的你说的死胡同堆叠最高值
你有没有做个检测呢,你的寻路肯定只有一种方式,不可能用A星算法的同时,又改用贪心算法。因为程序是不知道地形状况的,会自动识别是死胡同还是其它地形而判断用哪种算法
有空你做个动画演示案例看看,我测试一下,有不有问题
没事,你这样,你把你的死胡同地图转成json发出来(),大写XY表示你的障碍。随便你怎么设计,我用500 *
500的测,把你的耗时跟我的比下,我输了我道歉,你输了删帖重造下
一共多少格你告诉我
整个地图多少格,你这个小的可怜我测出来可能都是纳秒级没意义
我算耗时的,不跟你扯什么步数
你最好扫码一个json障碍地图坐标发出来,我懒的对着你的用例找障碍在哪

你一直说毫秒级别,难道怀疑我的不是毫秒级的?
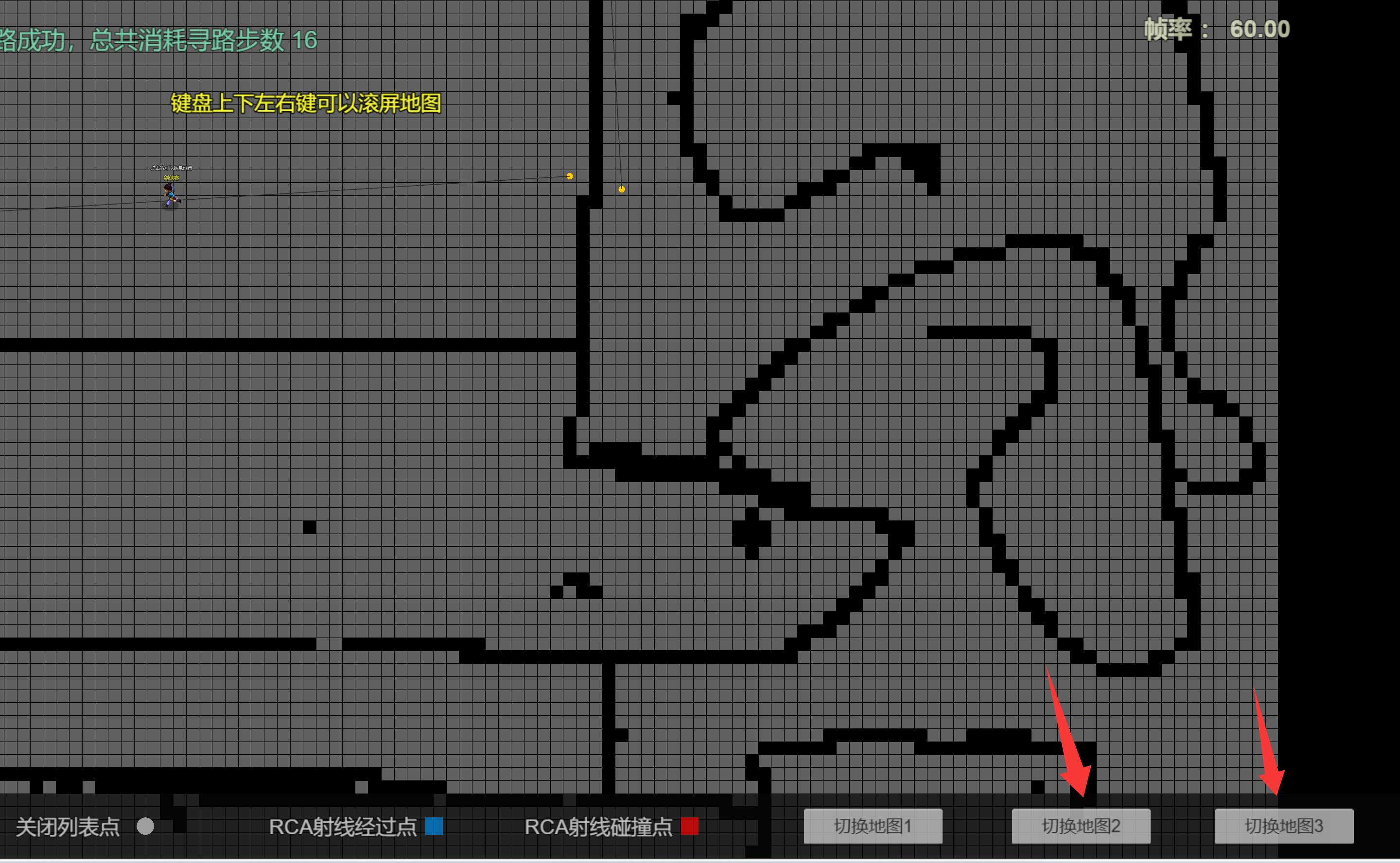
我是100W格的5毫秒以下,你连10W格都没上,你就说你是所谓的合格。我说的毫秒级意思是商业上的moba游戏寻路耗时5ms以下是0感知的,不管是客户端还是服务器。
该发的我都发了,包括我的地图编辑工具,相关的数据你可以用我的地图工具编辑数据。论坛平台又没权限直接发文件,我也不能听你说什么就按你的照做,相关工具提供给你了,你自己动手一下。
我动不了手,我设置障碍是1格格设置的,初始化地图的时候给个障碍列表,不然我手动对着你的地图设置要设置到明年去。
你在设置障碍的时候记录障碍点的xy添加进list里面,然后用json工具序列化这个list为json字符串,然后问下ai怎么生成json文件到桌面,你可以直接加我Q发我
或者你不用生成json格式文件,你在序列化json字符串那打断点,把字符串复制给我