
《RCA寻路》数据提前烘焙,可借助我写的地图编辑器烘焙,提前烘焙数据可以减少在线烘焙的耗时,提高玩家的体验。
提前烘焙操作如下
先打开在线地图编辑器
地图编辑器地址
https://easymapeditor-1258223435.cos.ap-guangzhou.myqcloud.com/v2.0.0/web-mobile/index.html
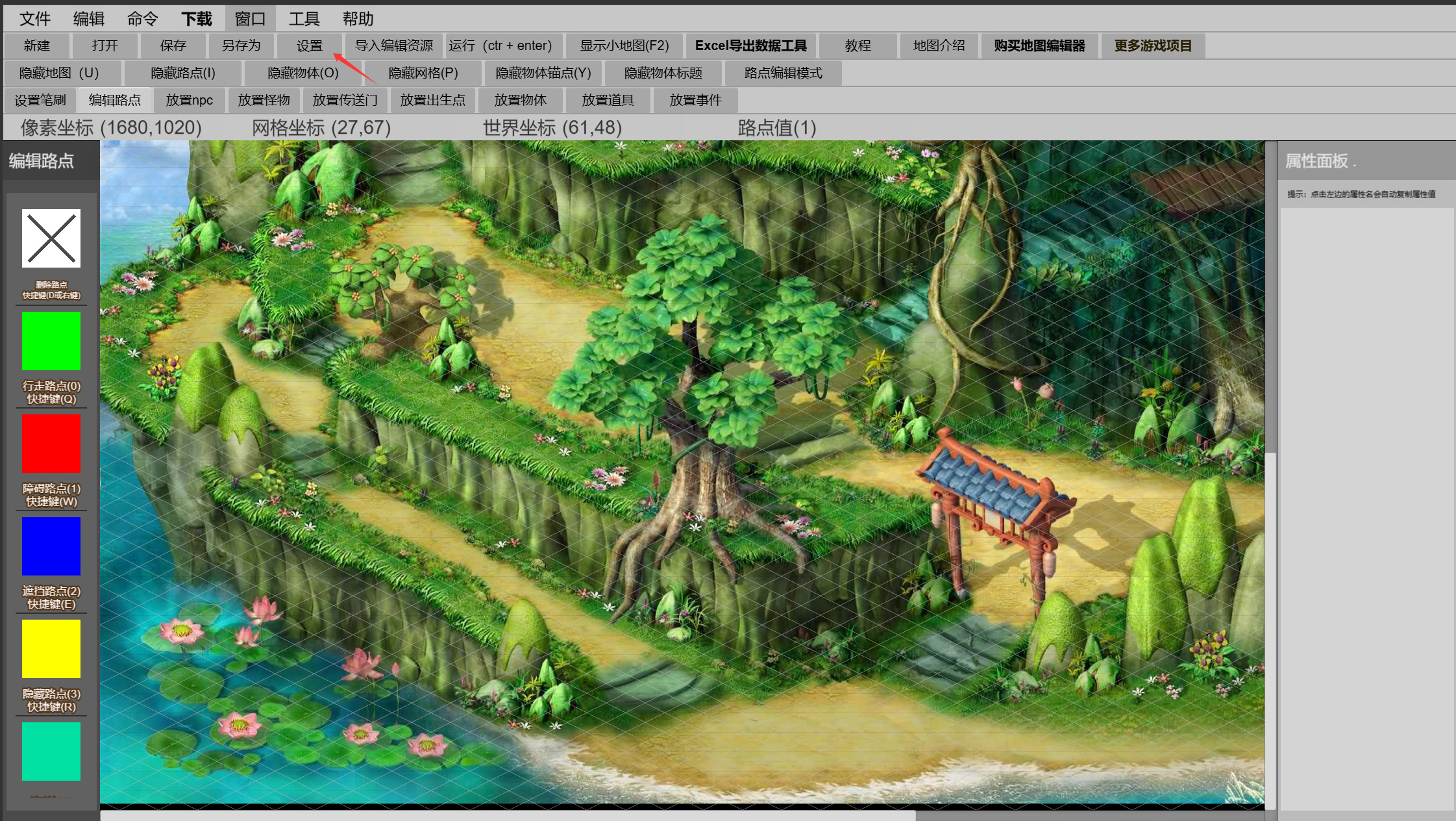
一、点击地图编辑器的设置按钮,打开设置面板。
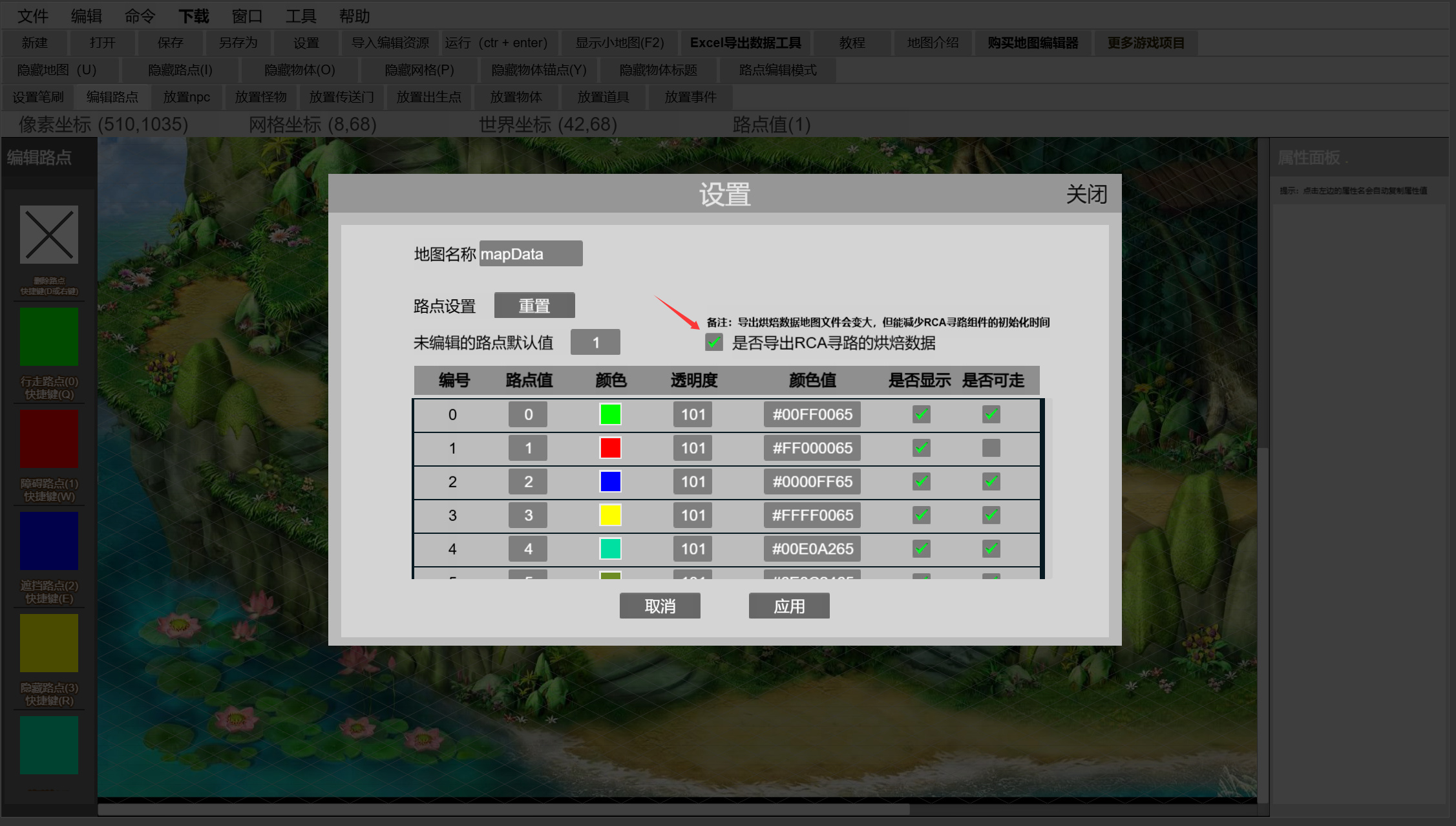
二、勾选设置界面上的“是否导出RCA烘焙数据”选项框。
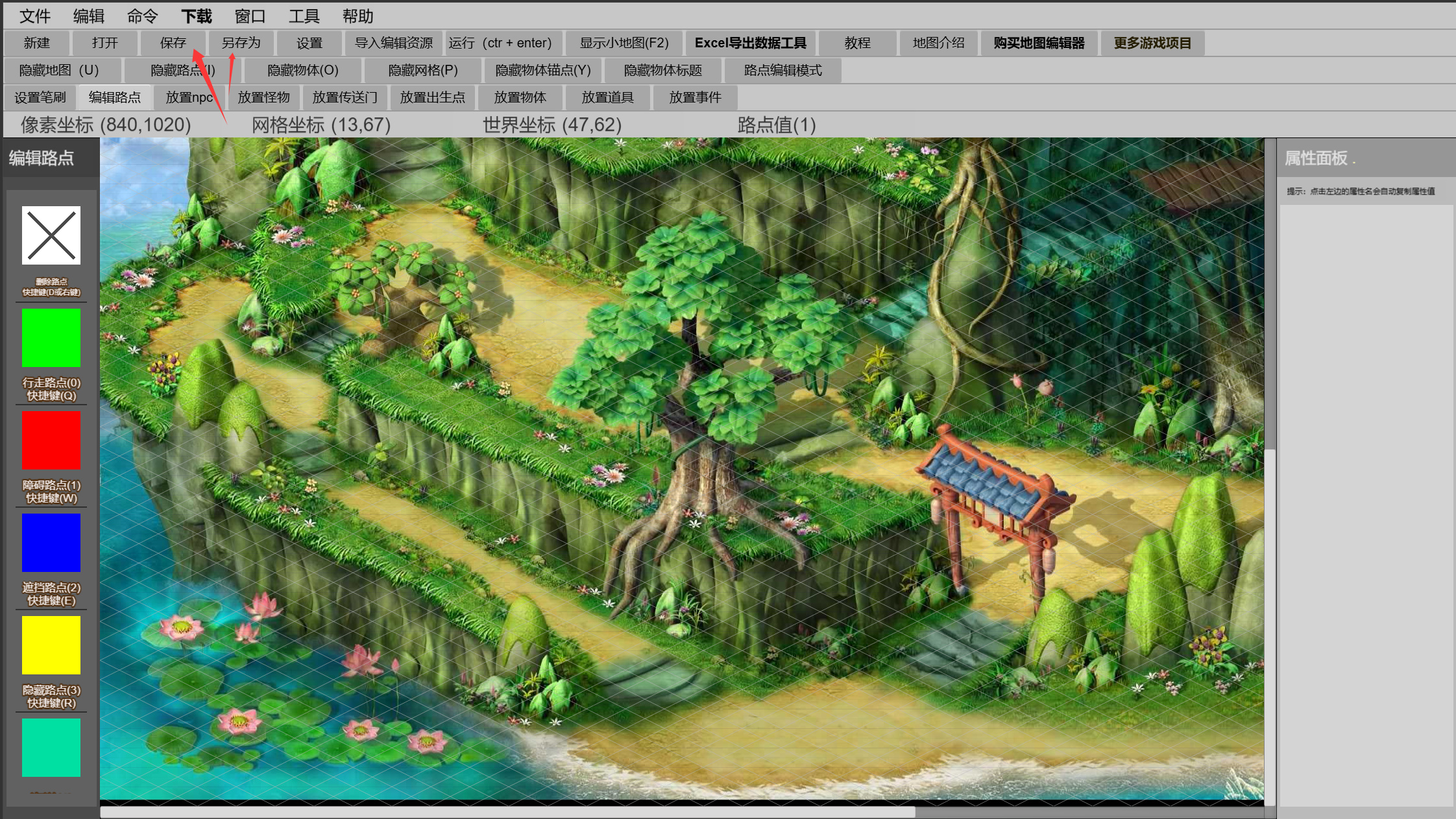
三、编辑完地图数据,点击工具栏的“保存”或“另存为”按钮,地图数据文件里就附带有RCA寻路烘焙数据了。
地图数据文件附带烘焙数据会比原文件大,这个由开发者按自己的项目情况选择是否导出烘焙数据,如果不导出烘焙数据,地图框架的RCA寻路组件会在运行时自动烘焙,会耗一些时间。如果读取地图文件的烘焙数据的话会节省很多在线烘焙时间。
