如下图:
这样镜像后怎么才能使球的运动轨迹完全相反?
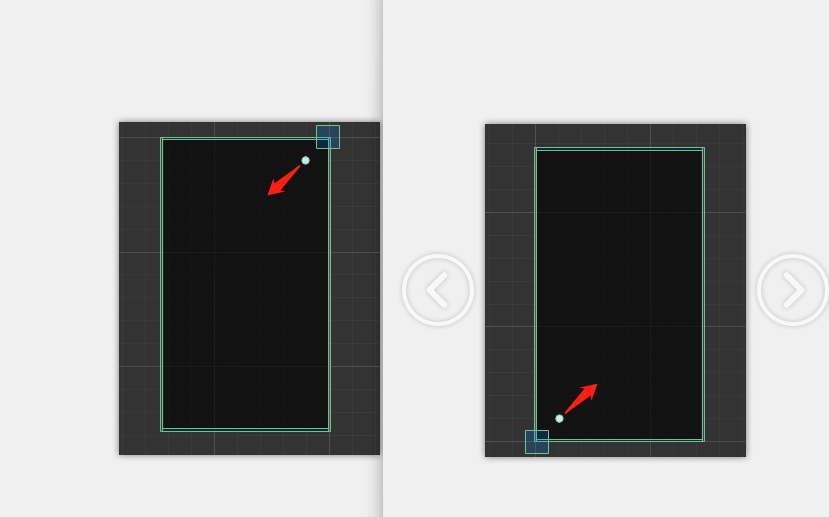
现在的做法,整体绕中心点旋转180度,发球方向完全相反,测试结果有误差,多碰撞几次后误差会越来越大
建议不要依赖物理引擎去实现一些简单的物理现象。
里面会有若干的障碍物,需要引擎的碰撞检测…
现在的尝试是每次碰撞后,手动去设置球的初始位置与反射向量。
再在初始位置与反射向量 小数点后3位进行4舍5入操作。
猜测是在计算反射相关数据时,旋转180度后double类型计算精度误差累计造成的。

现在的做法,整体绕中心点旋转180度,发球方向完全相反,测试结果有误差,多碰撞几次后误差会越来越大
建议不要依赖物理引擎去实现一些简单的物理现象。
里面会有若干的障碍物,需要引擎的碰撞检测…
现在的尝试是每次碰撞后,手动去设置球的初始位置与反射向量。
再在初始位置与反射向量 小数点后3位进行4舍5入操作。
猜测是在计算反射相关数据时,旋转180度后double类型计算精度误差累计造成的。