
记录开发过程中的小问题,请多指教
由于是直接从微信文制过来,文章样式格式有点乱·····
完整样式请阅读微信原文
更多笔记和源码请访问公众号

原文链接:https://mp.weixin.qq.com/s/IE9u7iJ2kgzMNKxucBrOkg
公众号回复:
A*简装版
获取源码

技术摘要
A*寻路
四方向和八方向
二叉堆(最小堆)
目标不可抵达时返回最近的可抵达区域
禁止穿越障碍物拐角
双向A*寻路
多层A*
多单位分帧寻路
多单位间相互碰撞
A*寻路
首先请拜读各路神仙的文章和代码,然后就可以不用看我继续哔哔了
A*寻路初探:
https://www.jianshu.com/p/e52d856e7d48
A comprehensive path-finding library in javascript:
https://github.com/qiao/PathFinding.js
演示地址:
http://qiao.github.io/PathFinding.js/visual/
TypeScript版本:
https://www.cnblogs.com/gamedaybyday/p/7778995.html
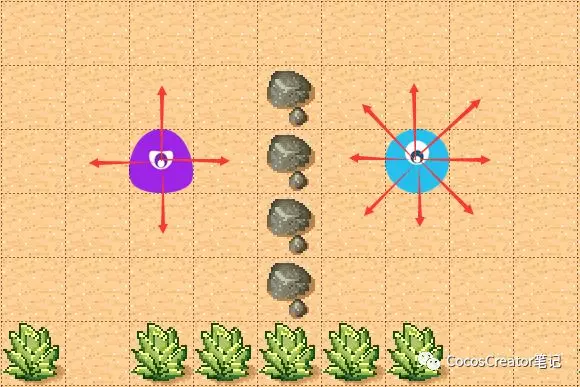
四方向和八方向
在检索相邻格子时候,判断是否是对角线
二叉堆
OpenList需要实时添加节点,而且每次取出最小值的节点,所以采用二叉堆(最小堆)作为开启列表的容器更合理一些
最小堆:根结点的键值是所有堆结点键值中最小者
关于二叉堆的实现:
https://eloquentjavascript.net/1st_edition/appendix2.html
和
https://www.npmjs.com/package/heap
均可使用
search(grid: Grid, startX: number, startY: number, endX: number, endY: number, closest = false): Array < Node > {
grid.cleanDirty();
let start = grid.getNode(startX, startY);
let end = grid.getNode(endX, endY);
let openHeap = this.newHeap();
let closestNode = start; // set the start node to be the closest if required
start.h = this.heuristic(start, end);
grid.markDirty(start);
openHeap.push(start);
while (openHeap.size() > 0) {
// Grab the lowest f(x) to process next. Heap keeps this sorted for us.
let currentNode = openHeap.pop();
// End case -- result has been found, return the traced path.
if (currentNode === end) {
return this.backtrace(currentNode);
}
// Normal case -- move currentNode from open to closed, process each of its neighbors.
currentNode.closed = true;
// Find all neighbors for the current node.
let neighbors = grid.neighbors(currentNode);
for (let i = 0; i < neighbors.length; ++i) {
let neighbor = neighbors[i];
if (neighbor.closed || neighbor.isWall()) {
// Not a valid node to process, skip to next neighbor.
continue;
}
// The g score is the shortest distance from start to current node.
// We need to check if the path we have arrived at this neighbor is the shortest one we have seen yet.
let gScore = currentNode.g + neighbor.getCost(currentNode);
let beenVisited = neighbor.visited;
if (beenVisited == VISITED.NONE || gScore < neighbor.g) {
// Found an optimal (so far) path to this node. Take score for node to see how good it is.
neighbor.visited = VISITED.START;
neighbor.parent = currentNode;
neighbor.h = neighbor.h || this.heuristic(neighbor, end);
neighbor.g = gScore;
neighbor.f = neighbor.g + neighbor.h;
grid.markDirty(neighbor);
if (closest) {
// If the neighbour is closer than the current closestNode or if it's equally close but has
// a cheaper path than the current closest node then it becomes the closest node
if (neighbor.h < closestNode.h || (neighbor.h === closestNode.h && neighbor.g < closestNode.g)) {
closestNode = neighbor;
}
}
if (beenVisited == VISITED.NONE) {
// Pushing to heap will put it in proper place based on the 'f' value.
openHeap.push(neighbor);
} else {
// Already seen the node, but since it has been rescored we need to reorder it in the heap
openHeap.rescoreElement(neighbor);
}
}
}
}
if (closest) {
return this.backtrace(closestNode);
}
// No result was found - empty array signifies failure to find path.
return [];
}
目标不可抵达时返回最近的可抵达区域


当目标位置不可抵达的时候,返回离目标位置最近的可抵达区域:
if (closest) {
// If the neighbour is closer than the current closestNode or if it’s equally close but has
// a cheaper path than the current closest node then it becomes the closest node
if (neighbor.h < closestNode.h || (neighbor.h === closestNode.h && neighbor.g < closestNode.g)) {
closestNode = neighbor;
}
}
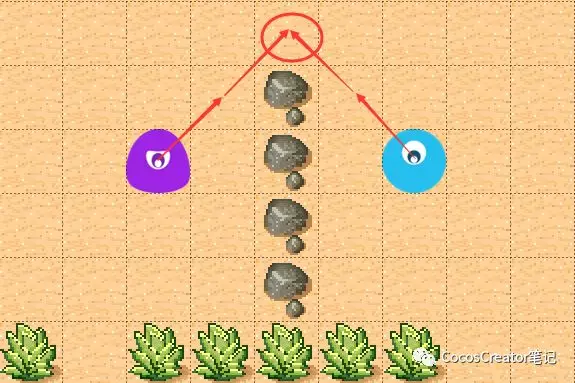
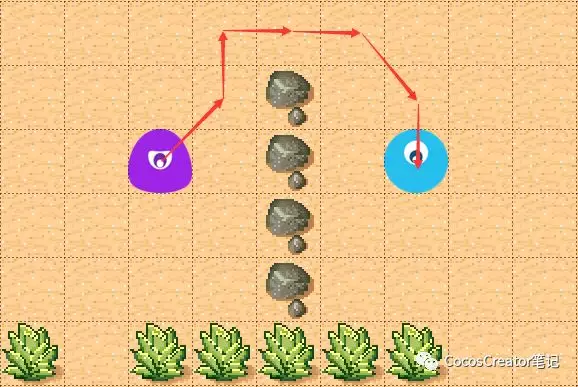
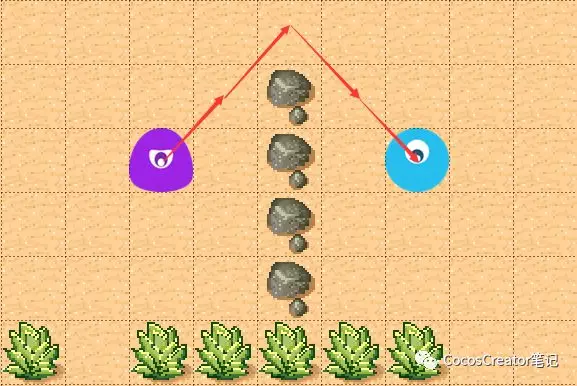
双向A*
以 起点->终点 和 终点->起点 分别进行A*寻路
直到某个节点在两个OpenList中同时出现
然后以同时出现的节点和当前节点分别进行回溯得到节点数组
拼接两个数组后再把终点节点放进数组得到的就是最终路径
允许穿过障碍物拐角
禁止穿过障碍物拐角:

禁止穿越障碍物拐角时,只需要在获取当前节点的相邻节点时多一步判断即可:
public neighbors(node: Node): Node[] {
let ret = [];
let x = node.x;
let y = node.y;
let s0 = false,
d0 = false,
s1 = false,
d1 = false,
s2 = false,
d2 = false,
s3 = false,
d3 = false;
if (!this.isWall(x, y - 1)) {
ret.push(this.nodes[x][y - 1]);
s0 = true;
}
if (!this.isWall(x + 1, y)) {
ret.push(this.nodes[x + 1][y]);
s1 = true;
}
if (!this.isWall(x, y + 1)) {
ret.push(this.nodes[x][y + 1]);
s2 = true;
}
if (!this.isWall(x - 1, y)) {
ret.push(this.nodes[x - 1][y]);
s3 = true;
}
if (!this.crossDiagonal) {
return ret;
}
if (this.crossCorner) {
d0 = s0 || s1;
d1 = s1 || s2;
d2 = s2 || s3;
d3 = s3 || s0;
} else {
d0 = s0 && s1;
d1 = s1 && s2;
d2 = s2 && s3;
d3 = s3 && s0;
}
if (d0 && !this.isWall(x + 1, y - 1)) {
ret.push(this.nodes[x + 1][y - 1]);
}
if (d1 && !this.isWall(x + 1, y + 1)) {
ret.push(this.nodes[x + 1][y + 1]);
}
if (d2 && !this.isWall(x - 1, y + 1)) {
ret.push(this.nodes[x - 1][y + 1]);
}
if (d3 && !this.isWall(x - 1, y - 1)) {
ret.push(this.nodes[x - 1][y - 1]);
}
return ret;
}
多层A*
A*占用CPU时间取决于当前节点和目标节点的距离
距离越远,相应的检索格子数量会越多
所以游戏中可以设计两层或者多层A*
当前节点和目标节点距离较远时,使用尺寸比较大的格子进行检索,当接近目标时,切换到较小尺寸的格子进行检索
多单位分帧寻路
多单位进行A*寻路时,可以把他们放进一个队列,每帧对其中N个单位进行寻路,这样可以缓解一帧内CPU的消耗。
多单元间相互碰撞

下面只是几种思考方式,具体如何取舍,决定权在你
①单元自身增加障碍物属性
②单元间碰撞检测,单元等待/重新寻路
③单元间碰撞检测,单元使用一定的移动规则,比如向左/向右/向前
④队伍中选出领队,对领队进行A*,队伍中其他单元跟随领队,需要处理单元间的相互碰撞,以及队伍的队形
⑤为每个单元的目标位置都加上一个偏移量
IDA*/最佳优先搜索/跳点搜索
IDA*:迭代加深搜索A*算法,使用回溯方法,在检索过程中采用估值(剪枝)函数,以减少不必要的检索,节省空间,但代价是会产生重复检索,难点在于估值函数的设定
https://www.xuebuyuan.com/1573926.html
IDA的基本思路是:首先将初始状态结点的H值设为阈值maxH,然后进行深度优先搜索,搜索过程中忽略所有H值大于maxH的结点;如果没有找到解,则加大阈值maxH,再重复上述搜索,直到找到一个解。在保证H值的计算满足A算法的要求下,可以证明找到的这个解一定是最优解。在程序实现上,IDA要比A 方便,因为不需要保存结点,不需要判断重复,也不需要根据H值对结点排序,占用空间小。 而这里在IDA*算法中也使用合适的估价函数,来评估与目标状态的距离。
在一般的问题中是这样使用IDA*算法的,当前局面的估价函数值+当前的搜索深度 > 预定义的最大搜索深度时,就进行剪枝。
这个估值函数的选取没有统一的标准,找到合适的该函数并不容易,但是可以大致按照这个原则:在一定范围内加大各个状态启发函数值的差别
最佳优先搜索:运用贪心算法的思想,优先检索离终点近的节点。贪心算法(又称贪婪算法)是指,在对问题求解时,总是做出在当前看来是最好的选择。也就是说,不从整体最优上加以考虑,他所做出的是在某种意义上的局部最优解。最佳优先搜索得到的路径不一定是最优路径
https://www.ituring.com.cn/article/497664
跳点搜索: 通过一定规则来裁剪相邻节点,设置为跳点。 比如方向相同,权重相等的节点所形成的大面积可行走区域,就可以省略其中相邻节点的检索

 的一P
的一P