第一节移动,我是直接设置坐标的,这样操作,在几个物理引擎中表现是不一样的,在CANNON中,会无视约束跟随鼠标,看上去像bug,所以我把第一个节点隐藏了,第二个节点之后都是正常的
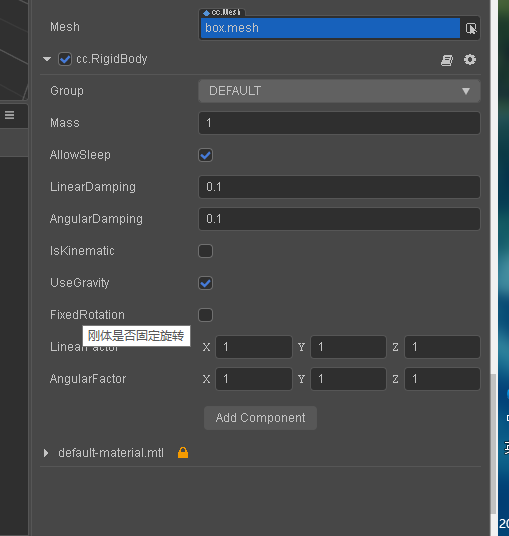
下面是我调的参数
createRope(nodes:number,staticTar_:Node,plugTar_:Node){
this.staticTar = staticTar_
this.plugTar = plugTar_
let lastNode:Node = null
let cannonWorld = cc.PhysicsSystem.instance.physicsWorld._world
console.log('>>>0>>',cc.PhysicsSystem.instance)
console.log('>>>>>',cannonWorld)
let node_ = this.node
node_.getComponent(RigidBodyComponent).allowSleep = false
node_.getComponent(RigidBodyComponent).useGravity = false
node_.setPosition(this.plugTar.getPosition())
let nodec = node_.getComponent(ColliderComponent)
nodec.setGroup(PHY_GROUP.Group1)
nodec.setMask(PHY_GROUP.Group0)
///每个节点坐标位移
let sx:number = this.plugTar.getPosition().x
let sz:number = this.plugTar.getPosition().z
let sy:number = this.plugTar.getPosition().y
let mx:number = (this.staticTar.getPosition().x - this.plugTar.getPosition().x)/nodes
let mz:number = (this.staticTar.getPosition().z - this.plugTar.getPosition().z)/nodes
for(let i = 0 ;i<nodes;i++){
let nod:Node = cc.instantiate(node_);
this.node.parent.addChild(nod)
nod.getComponent(RigidBodyComponent).allowSleep = false
nod.getComponent(RigidBodyComponent).mass = 0.3
nod.setPosition(new Vec3(sx+mx,sy+1,sz+mz))
let nodec2 = nod.getComponent(ColliderComponent)
nodec2.setGroup(PHY_GROUP.Group1)
nodec2.setMask(PHY_GROUP.Group0)
//由于cannon.js的bug,第一节有问题,只能作为受力点,所以隐藏,第二节是插头
let fdis:number = 0.8
if(i==0){
this.fllowNode = nod
this.fllowNode.getComponent(RigidBodyComponent).mass = 100
fdis = 1.2
///表现节点增加插头模型,,插头跟随点
}
if(i == nodes -1){
// nod.getComponent(RigidBodyComponent).mass = 100
this.tail = nod
////与静态物体链接
let stat_node:any = (this.staticTar.getComponent(RigidBodyComponent) as any)._body.impl
let tl_node:any = (nod.getComponent(RigidBodyComponent) as any)._body.impl
let joint_st = new CANNON.DistanceConstraint(stat_node, tl_node, fdis,1000)
cannonWorld.addConstraint(joint_st)
// let agt_st = new CANNON.ConeTwistConstraint(stat_node, tl_node,{
// pivotA: stat_node.position,
// pivotB: tl_node.position,
// axisA: new CANNON.Vec3(30,30,30),
// axisB: new CANNON.Vec3(30,30,30)
// })
// cannonWorld.addConstraint(agt_st)
}
if(lastNode){
let cn_lastNode:any = (lastNode.getComponent(RigidBodyComponent) as any)._body.impl
let cn_node:any = (nod.getComponent(RigidBodyComponent) as any)._body.impl
let joint = new CANNON.DistanceConstraint(cn_lastNode, cn_node, fdis,1000)
cannonWorld.addConstraint(joint)
// let agt = new CANNON.ConeTwistConstraint(cn_lastNode, cn_node,{
// pivotA: cn_lastNode.position,
// pivotB: cn_node.position,
// axisA: new CANNON.Vec3(30,30,30),
// axisB: new CANNON.Vec3(30,30,30)
// })
// cannonWorld.addConstraint(agt)
}else{
this.head = node_
this.head.getComponent(RigidBodyComponent).mass = 1
let cn_lastNode2:any = (node_.getComponent(RigidBodyComponent) as any)._body.impl
let cn_node2:any = (nod.getComponent(RigidBodyComponent) as any)._body.impl
let joint_ = new CANNON.DistanceConstraint(cn_lastNode2, cn_node2, 0,1000) ///反正会隐藏,所以关节距离0
cannonWorld.addConstraint(joint_)
// let agt_ = new CANNON.ConeTwistConstraint(cn_lastNode2, cn_node2,{
// pivotA: cn_lastNode2.position,
// pivotB: cn_node2.position,
// axisA: new CANNON.Vec3(30,30,30),
// axisB: new CANNON.Vec3(30,30,30)
// })
// cannonWorld.addConstraint(agt_)
}
lastNode = nod
}
node_.getComponent(ModelComponent).enabled = false
return this.head
}