
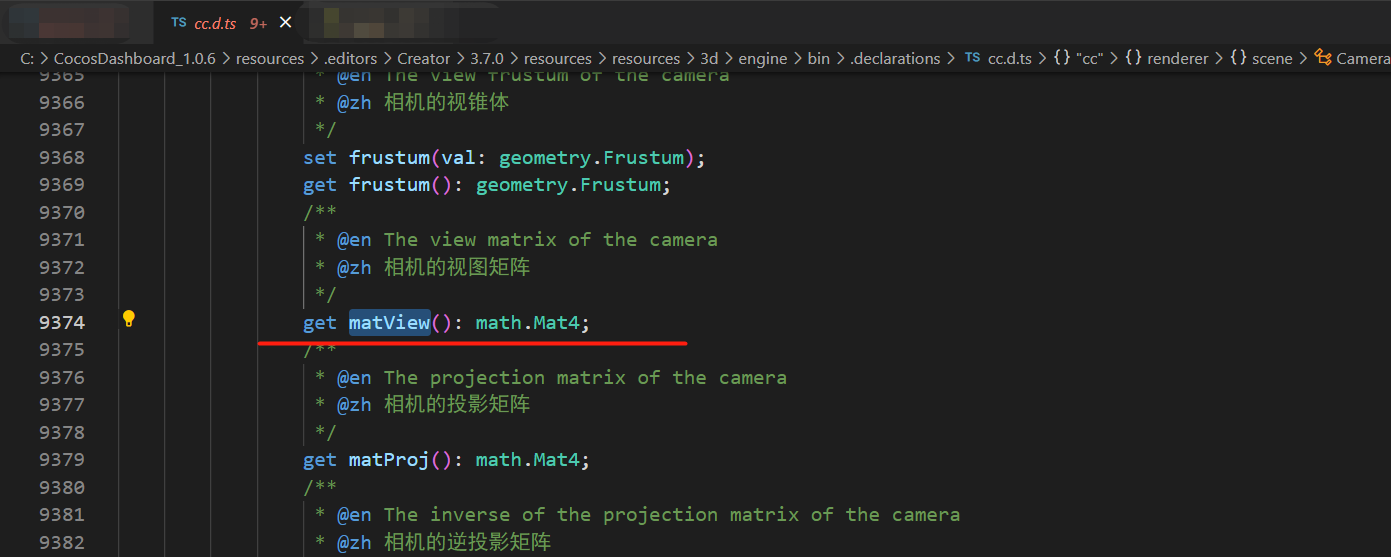
看的api中, matView()相机的视图矩阵只有get方法,有没有其他办法,进行设置值呢?
,
现在想实现,类似 threejs 中对 相机的 视图矩阵 和 逆视图矩阵,直接设置 :
类似这样的效果:
http://openlayers.vip/examples/csdn/cesium-three.html
,
three.camera.matrixWorldInverse.set( // 设置 相机的 逆视图矩阵
cvm[0], cvm[4], cvm[8], cvm[12],
cvm[1], cvm[5], cvm[9], cvm[13],
cvm[2], cvm[6], cvm[10], cvm[14],
cvm[3], cvm[7], cvm[11], cvm[15]
);
three.camera.matrixWorld.set( //设置 相机的 视图矩阵
civm[0], civm[4], civm[8], civm[12],
civm[1], civm[5], civm[9], civm[13],
civm[2], civm[6], civm[10], civm[14],
civm[3], civm[7], civm[11], civm[15]
);
参考的文章:,Integrating Cesium with Three.js – Cesium
,
最新版cesium集成threejs_非科班Java出身GISer的博客-CSDN博客_cesium threejs ,