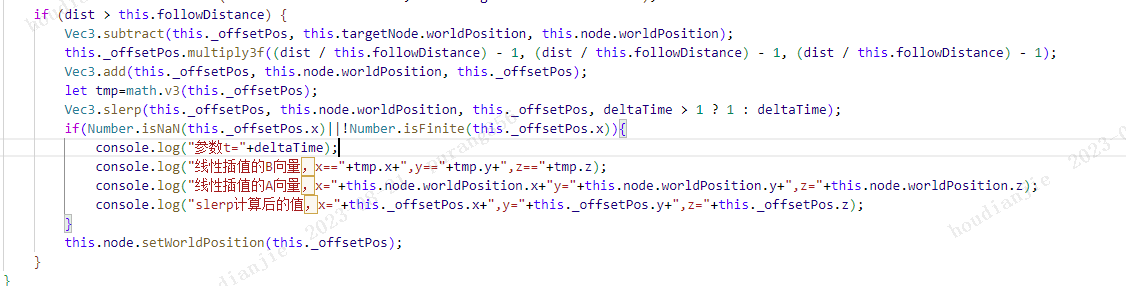
([A向量:x=32,y=5,z=-20][B向量:x=-12.05391274983743,y=-8.553789623637115,z=174.03775223657198][参数t:4.513500000238419][结果向量:x=-12.05391274983743,y=-8.553789623637115,z=174.03775223657198])
([A向量:x=-12.05391274983743,y=4.997222185134888,z=174.03775223657198][B向量:x=618.1074623824767,y=-50.11410198145256,z=-2601.5407838733154][参数t:3.46][结果向量:x=618.1074623824767,y=-50.11410198145256,z=-2601.5407838733154])
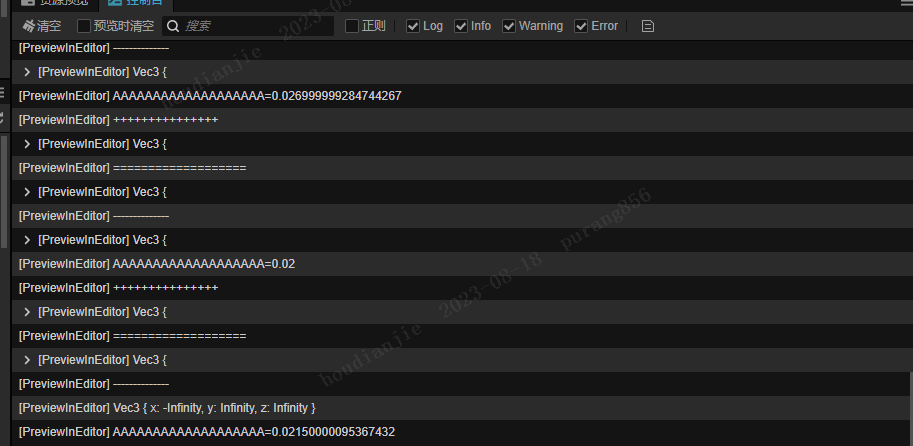
([A向量:x=618.1074623824767,y=4.991671442985535,z=-2601.5407838733154][B向量:x=-199238.90708315774,y=-1001.239130137733,z=877679.0694758866][参数t:0.02399999976158142][结果向量:x=-4178.460839060863,y=-19.15786755504759,z=18525.193652485672])
([A向量:x=-4178.460839060863,y=4.9833526611328125,z=18525.193652485672][B向量:x=9954189.36176612,y=-7106.934381201556,z=-43843623.57309272][参数t:0.085][结果向量:x=842282.8040823797,y=-599.5296547171957,z=-3709757.4515208574])
([A向量:x=842282.8040823797,y=4.972270727157593,z=-3709757.4515208574][B向量:x=-400513377736.1969,y=-1426563.864344913,z=1764081993302.5283][参数t:0.08300000071525573][结果向量:x=-33241838265.24309,y=-118400.24218873252,z=146415404858.29922])
([A向量:x=-33241838265.24309,y=4.9584304094314575,z=146415404858.29922][B向量:x=623872717391565700000,y=-56303088172.287506,z=-2.7478798161708916e+21][参数t:0.0825][结果向量:x=51469499154304780000,y=-4645004769.664359,z=-226700084699762430000])
([A向量:x=51469499154304780000,y=4.941836595535278,z=-226700084699762430000][B向量:x=-1.495635667107915e+39,y=-87176037751447030000,z=6.587605047347576e+39][参数t:0.08349999904632568][结果向量:x=-1.2488557677716157e+38,y=-7279199069108278000,z=5.500650151710929e+38])
([A向量:x=-1.2488557677716157e+38,y=4.922494173049927,z=5.500650151710929e+38][B向量:x=8.805428540368381e+75,y=-2.1152391094962714e+38,z=-3.878396776185185e+76][参数t:0.08350000023841857][结果向量:x=7.352532852201375e+74,y=-1.7662246614725095e+37,z=-3.238461317361447e+75])
([A向量:x=7.352532852201375e+74,y=4.900407791137695,z=-3.238461317361447e+75][B向量:x=-3.0521078536526385e+149,y=-1.245329160034488e+75,z=1.3443167707179707e+150][参数t:0.08300000071525573][结果向量:x=-2.5332495403620665e+148,y=-1.0336232117359132e+74,z=1.1157829293112185e+149])
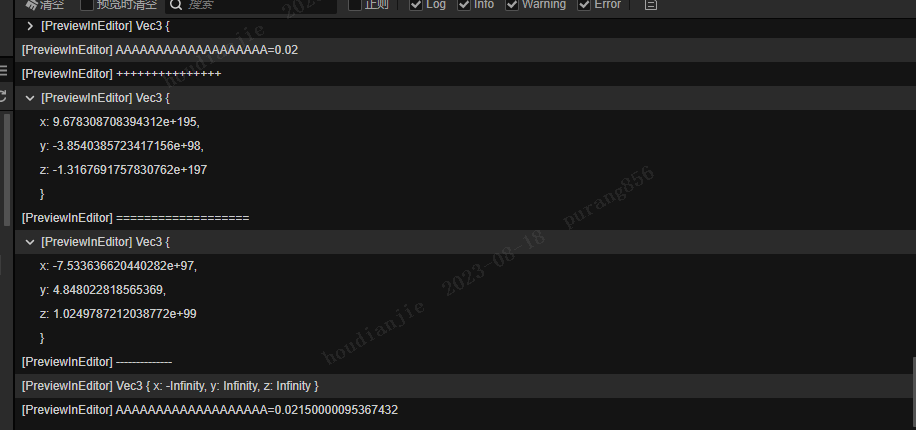
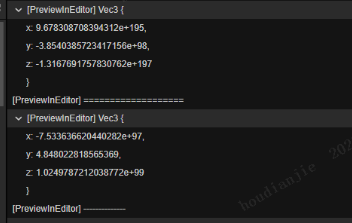
([A向量:x=-2.5332495403620665e+148,y=4.875582456588745,z=1.1157829293112185e+149][B向量:x=3.6231129566146925e+296,y=-4.290670420210782e+148,z=-1.5958189367239276e+297][参数t:0.08299999952316284][结果向量:x=3.0071837367138456e+295,y=-3.561256428315438e+147,z=-1.3245297098714022e+296])
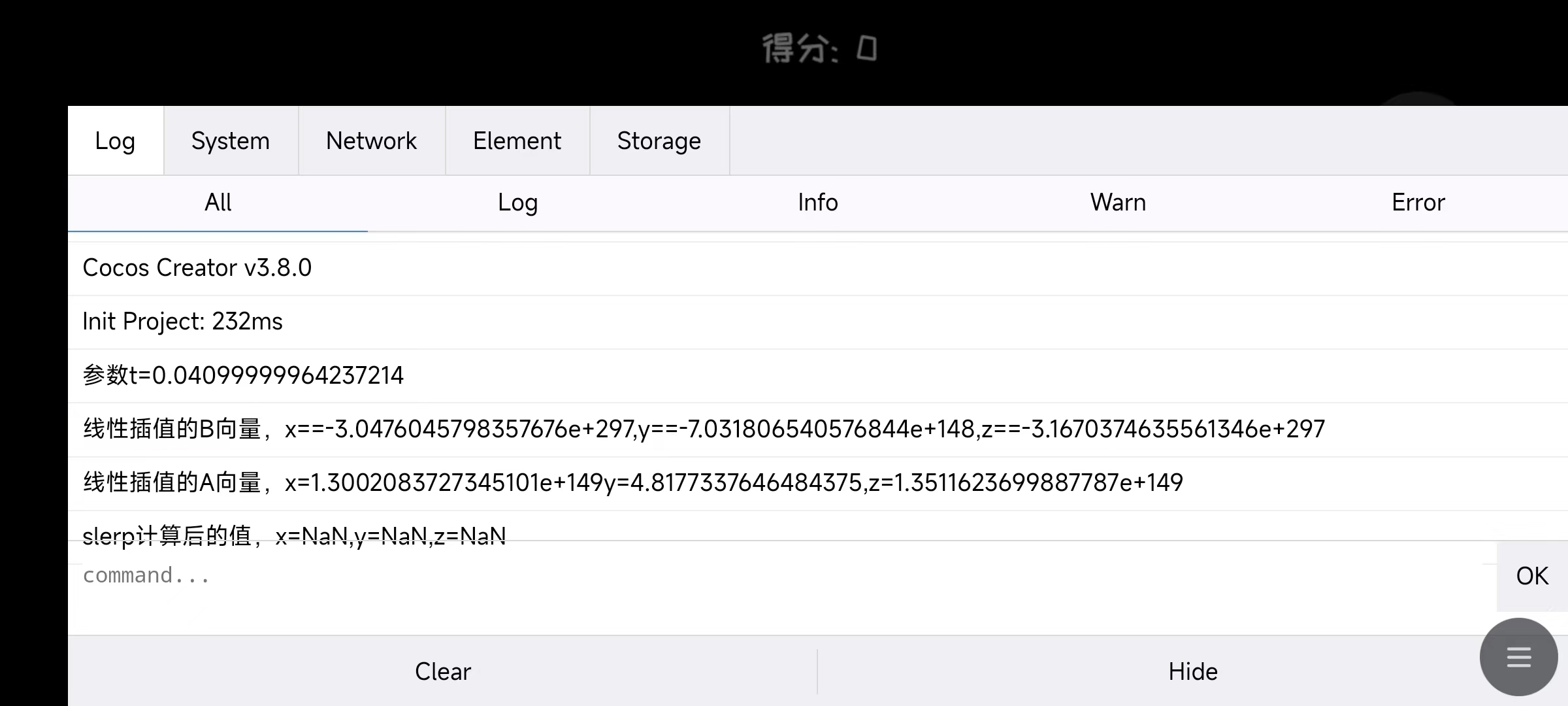
([A向量:x=3.0071837367138456e+295,y=4.848022818565369,z=-1.3245297098714022e+296][B向量:x=-Infinity,y=-Infinity,z=Infinity][参数t:0.08399999976158143][结果向量:x=-Infinity,y=-Infinity,z=Infinity])