mat4 inverse_mat4(mat4 m)
{
float Coef00 = m[2][2] * m[3][3] - m[3][2] * m[2][3];
float Coef02 = m[1][2] * m[3][3] - m[3][2] * m[1][3];
float Coef03 = m[1][2] * m[2][3] - m[2][2] * m[1][3];
float Coef04 = m[2][1] * m[3][3] - m[3][1] * m[2][3];
float Coef06 = m[1][1] * m[3][3] - m[3][1] * m[1][3];
float Coef07 = m[1][1] * m[2][3] - m[2][1] * m[1][3];
float Coef08 = m[2][1] * m[3][2] - m[3][1] * m[2][2];
float Coef10 = m[1][1] * m[3][2] - m[3][1] * m[1][2];
float Coef11 = m[1][1] * m[2][2] - m[2][1] * m[1][2];
float Coef12 = m[2][0] * m[3][3] - m[3][0] * m[2][3];
float Coef14 = m[1][0] * m[3][3] - m[3][0] * m[1][3];
float Coef15 = m[1][0] * m[2][3] - m[2][0] * m[1][3];
float Coef16 = m[2][0] * m[3][2] - m[3][0] * m[2][2];
float Coef18 = m[1][0] * m[3][2] - m[3][0] * m[1][2];
float Coef19 = m[1][0] * m[2][2] - m[2][0] * m[1][2];
float Coef20 = m[2][0] * m[3][1] - m[3][0] * m[2][1];
float Coef22 = m[1][0] * m[3][1] - m[3][0] * m[1][1];
float Coef23 = m[1][0] * m[2][1] - m[2][0] * m[1][1];
const vec4 SignA = vec4( 1.0, -1.0, 1.0, -1.0);
const vec4 SignB = vec4(-1.0, 1.0, -1.0, 1.0);
vec4 Fac0 = vec4(Coef00, Coef00, Coef02, Coef03);
vec4 Fac1 = vec4(Coef04, Coef04, Coef06, Coef07);
vec4 Fac2 = vec4(Coef08, Coef08, Coef10, Coef11);
vec4 Fac3 = vec4(Coef12, Coef12, Coef14, Coef15);
vec4 Fac4 = vec4(Coef16, Coef16, Coef18, Coef19);
vec4 Fac5 = vec4(Coef20, Coef20, Coef22, Coef23);
vec4 Vec0 = vec4(m[1][0], m[0][0], m[0][0], m[0][0]);
vec4 Vec1 = vec4(m[1][1], m[0][1], m[0][1], m[0][1]);
vec4 Vec2 = vec4(m[1][2], m[0][2], m[0][2], m[0][2]);
vec4 Vec3 = vec4(m[1][3], m[0][3], m[0][3], m[0][3]);
vec4 Inv0 = SignA * (Vec1 * Fac0 - Vec2 * Fac1 + Vec3 * Fac2);
vec4 Inv1 = SignB * (Vec0 * Fac0 - Vec2 * Fac3 + Vec3 * Fac4);
vec4 Inv2 = SignA * (Vec0 * Fac1 - Vec1 * Fac3 + Vec3 * Fac5);
vec4 Inv3 = SignB * (Vec0 * Fac2 - Vec1 * Fac4 + Vec2 * Fac5);
mat4 Inverse = mat4(Inv0, Inv1, Inv2, Inv3);
vec4 Row0 = vec4(Inverse[0][0], Inverse[1][0], Inverse[2][0], Inverse[3][0]);
float Determinant = dot(m[0], Row0);
Inverse /= Determinant;
return Inverse;
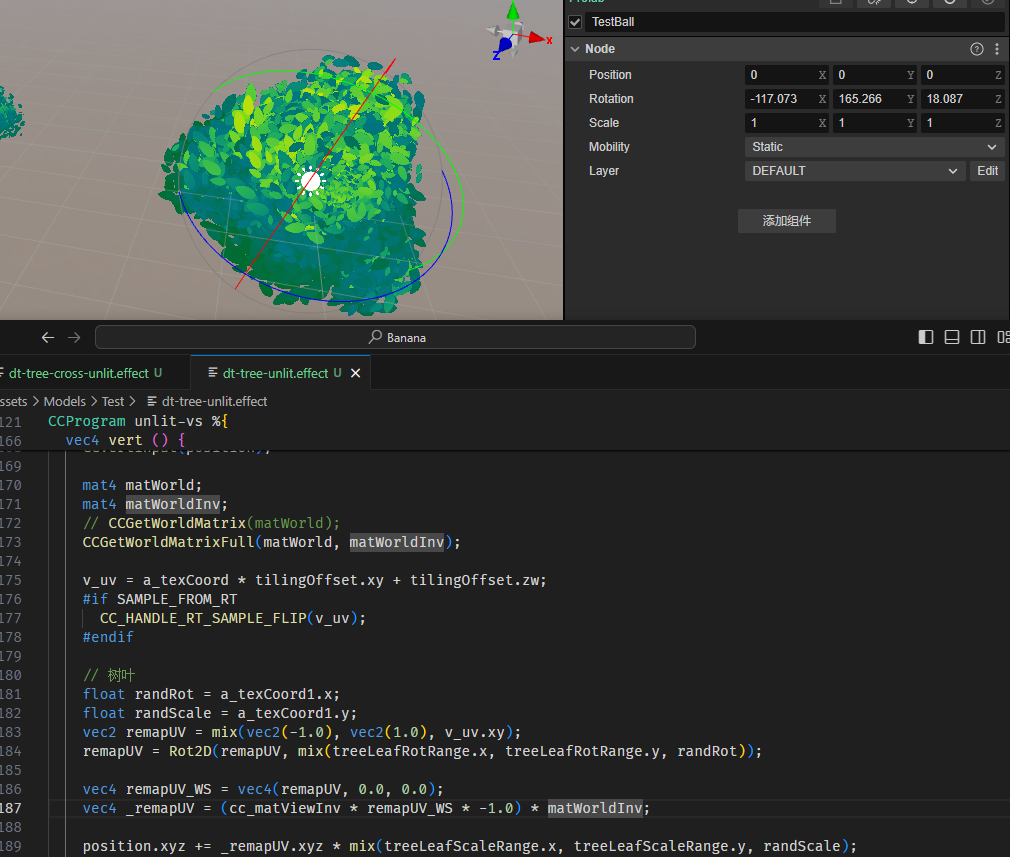
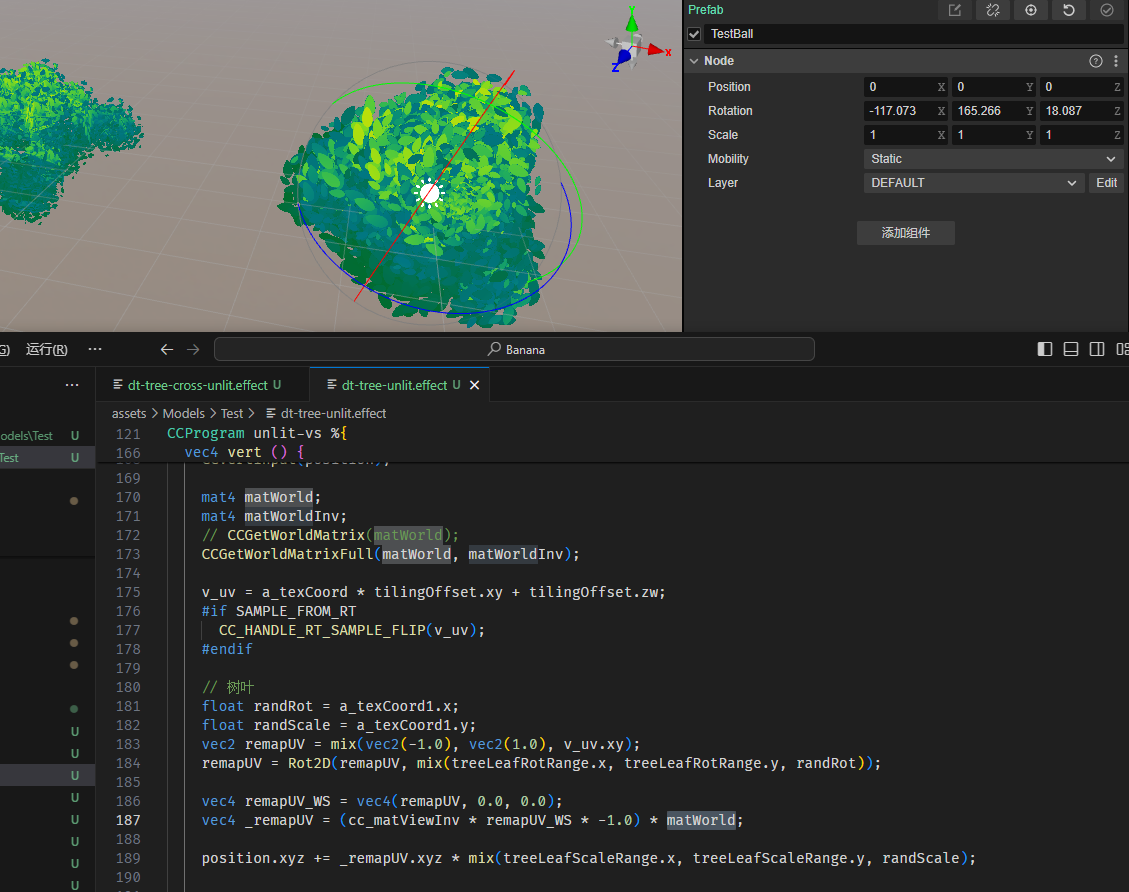
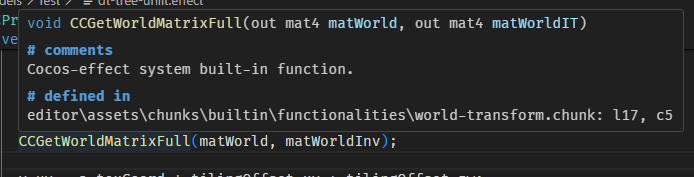
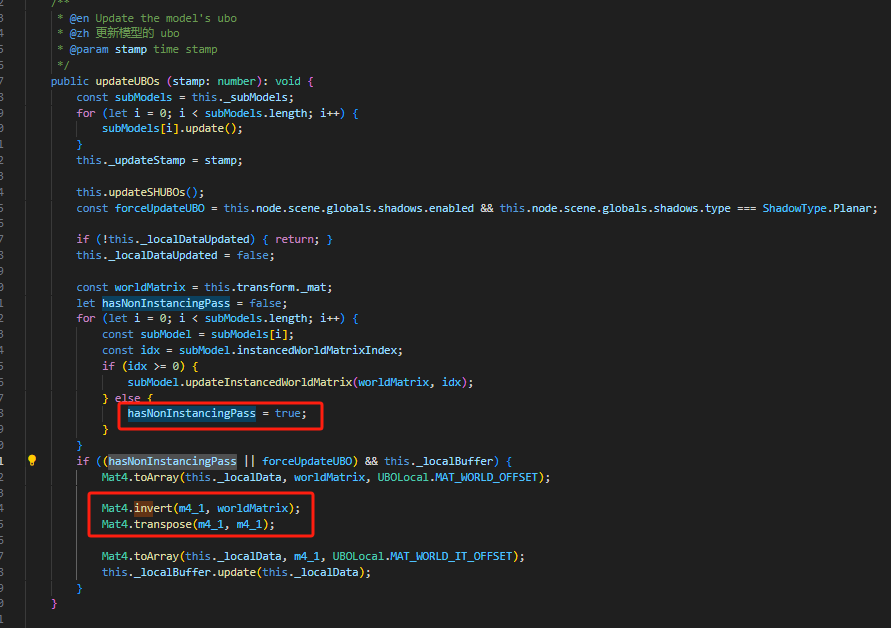
} 我也是从论坛的某个大佬那里拷贝来的矩阵求逆