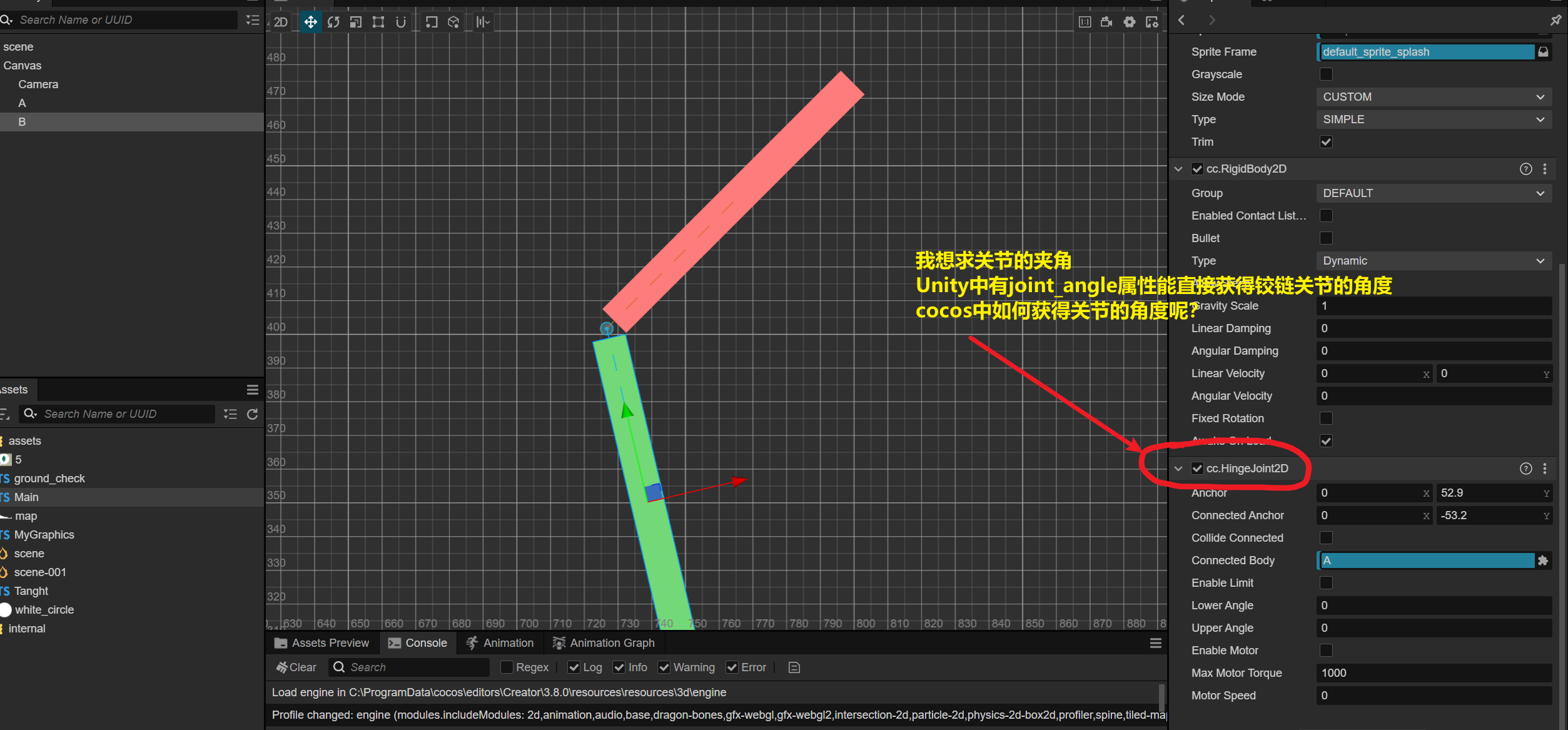
找到了一个方法,目前来看没有问题,但是我无法证明此方法没有BUG。
用到的API是Quat.getAxisAngle, 这个函数可以获取四元数的旋转轴和旋转弧度。
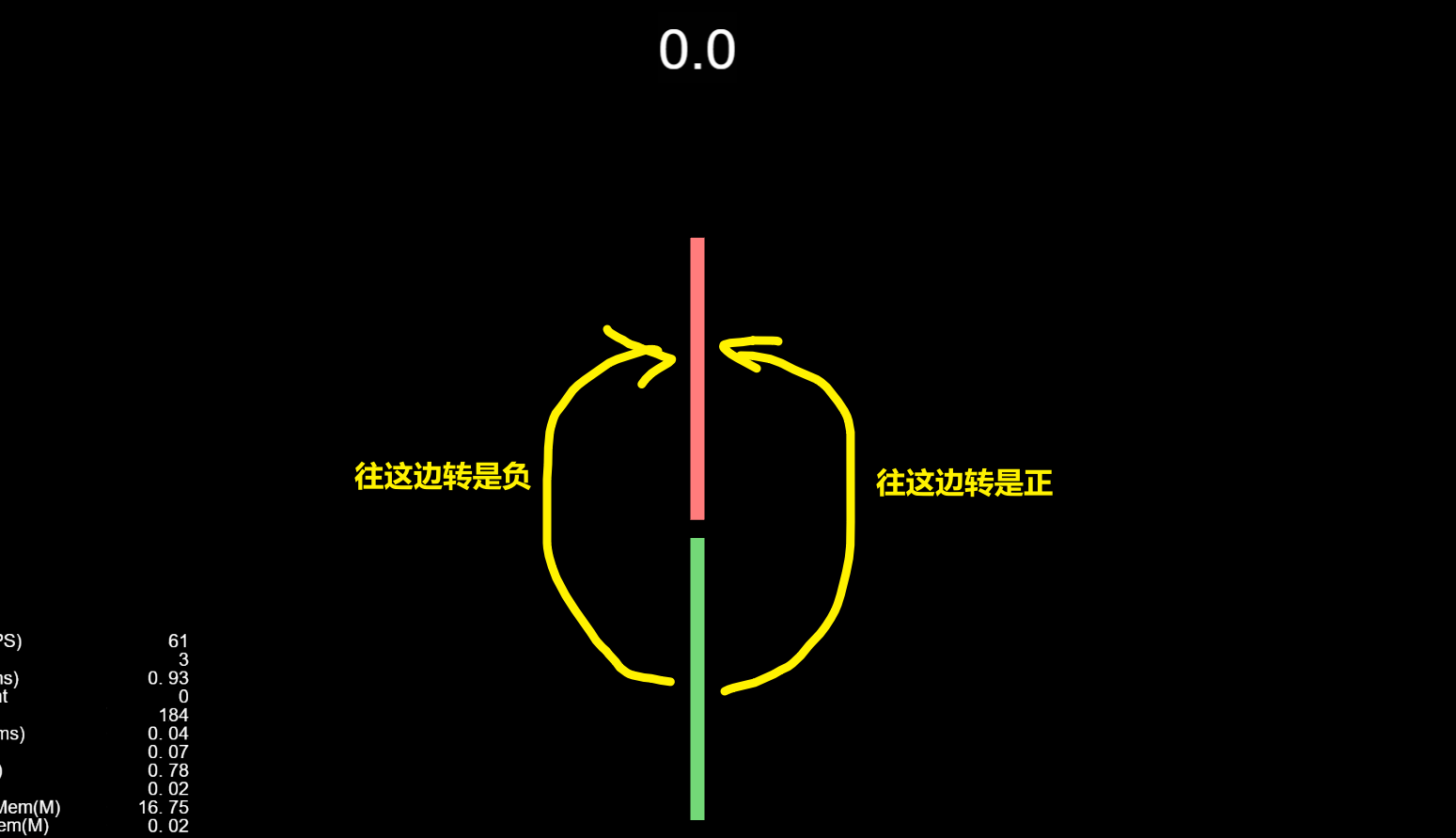
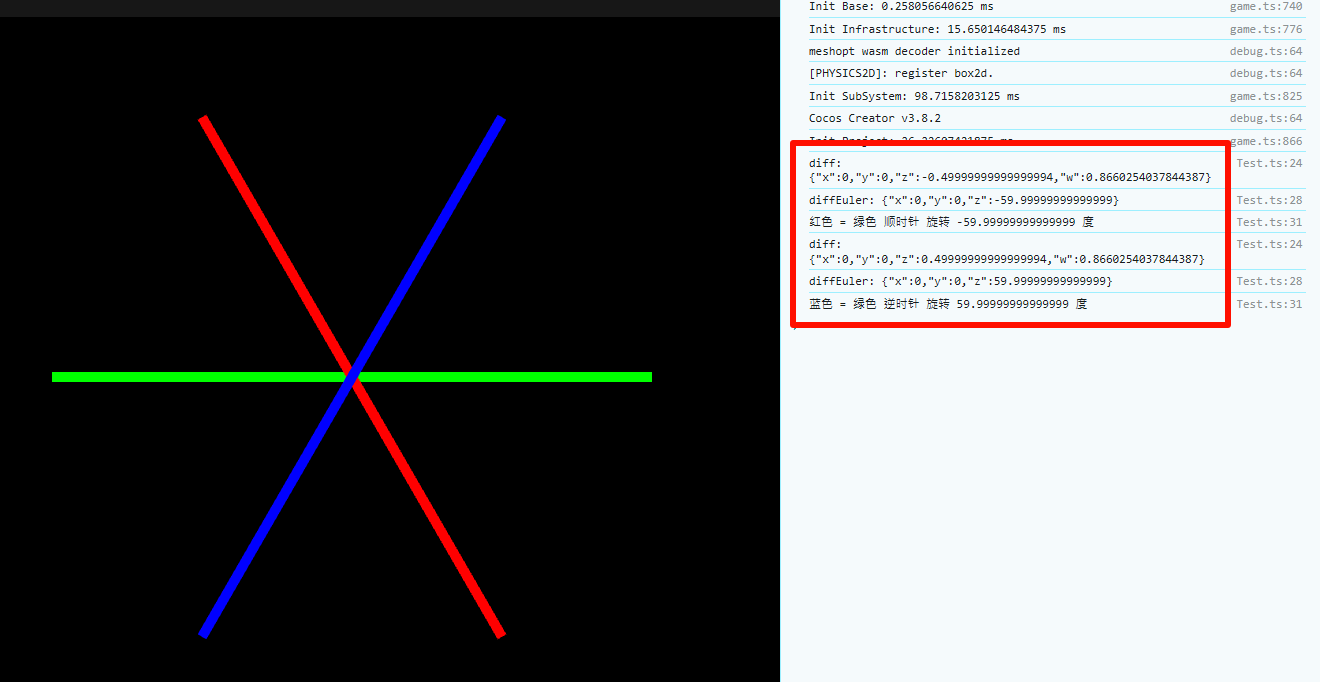
对于2D游戏来说,旋转轴要么是Z轴正方向,要么是Z轴负方向。
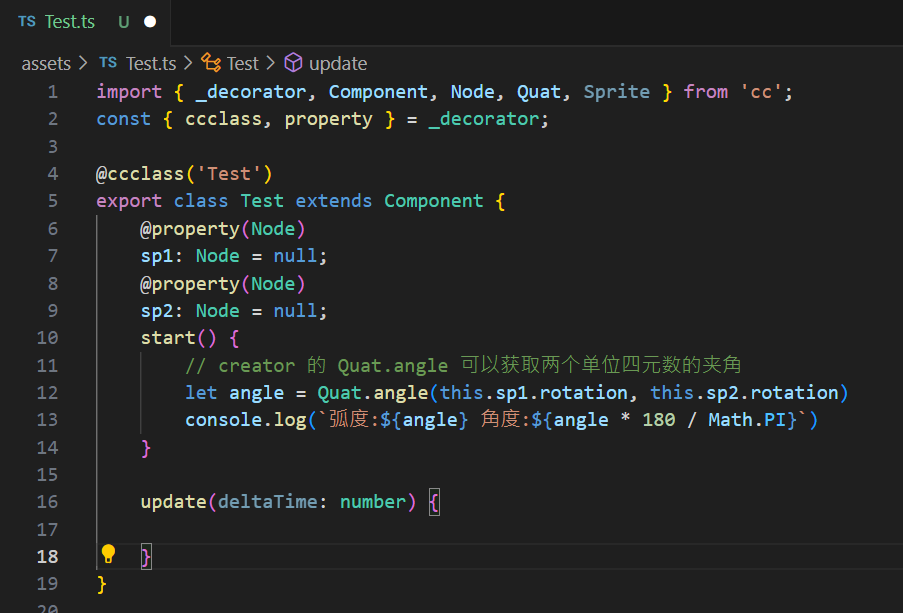
下面是我的代码,大家可以看看 
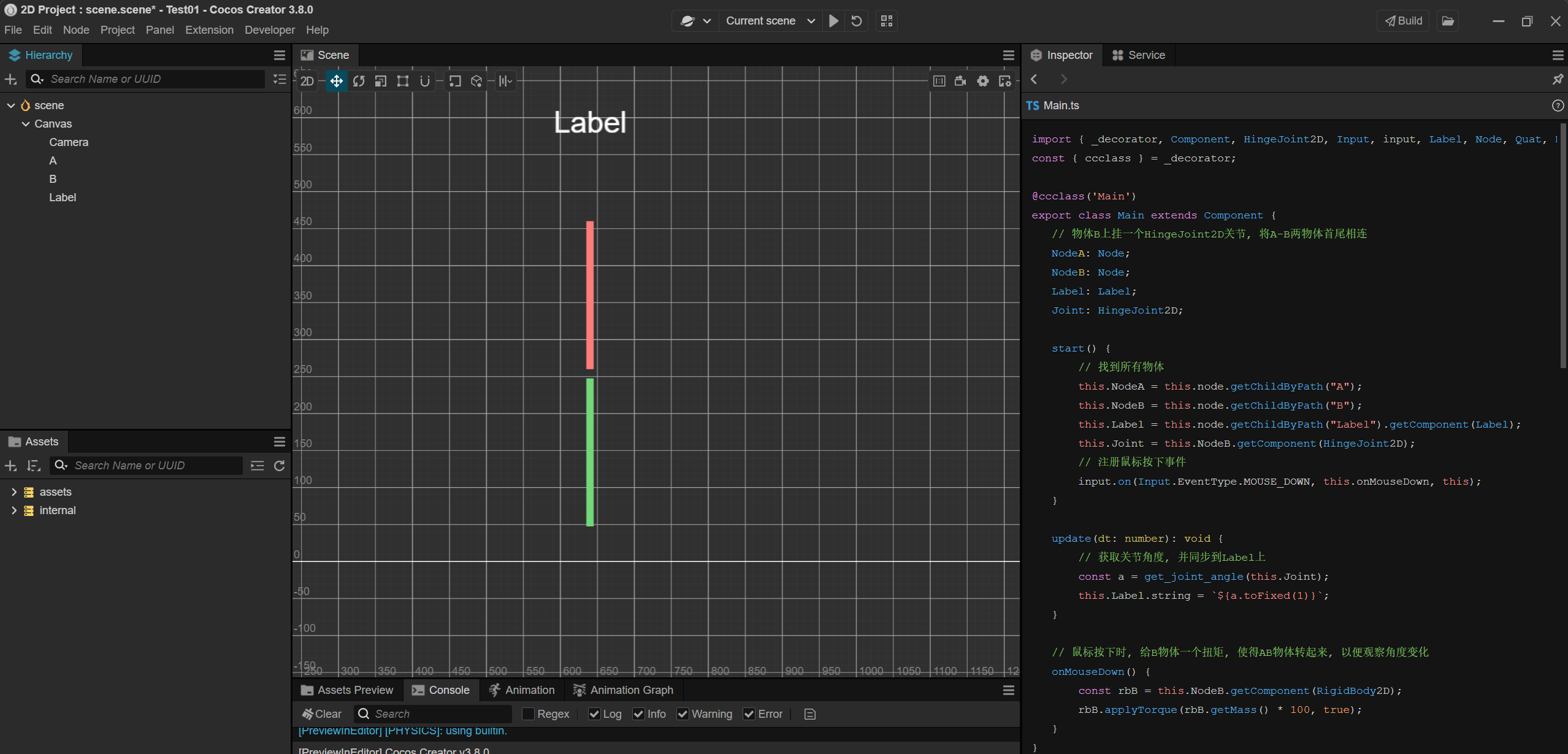
import { _decorator, Component, HingeJoint2D, Input, input, Label, Node, Quat, RigidBody2D, Vec3 } from 'cc';
const { ccclass } = _decorator;
@ccclass('Main')
export class Main extends Component {
// 物体B上挂一个HingeJoint2D关节, 将A-B两物体首尾相连
NodeA: Node;
NodeB: Node;
Label: Label;
Joint: HingeJoint2D;
start() {
// 找到所有物体
this.NodeA = this.node.getChildByPath("A");
this.NodeB = this.node.getChildByPath("B");
this.Label = this.node.getChildByPath("Label").getComponent(Label);
this.Joint = this.NodeB.getComponent(HingeJoint2D);
// 注册鼠标按下事件
input.on(Input.EventType.MOUSE_DOWN, this.onMouseDown, this);
}
update(dt: number): void {
// 获取关节角度, 并同步到Label上
const a = get_joint_angle(this.Joint);
this.Label.string = `${a.toFixed(1)}`;
}
// 鼠标按下时, 给B物体一个扭矩, 使得AB物体转起来, 以便观察角度变化
onMouseDown() {
const rbB = this.NodeB.getComponent(RigidBody2D);
rbB.applyTorque(rbB.getMass() * 100, true);
}
}
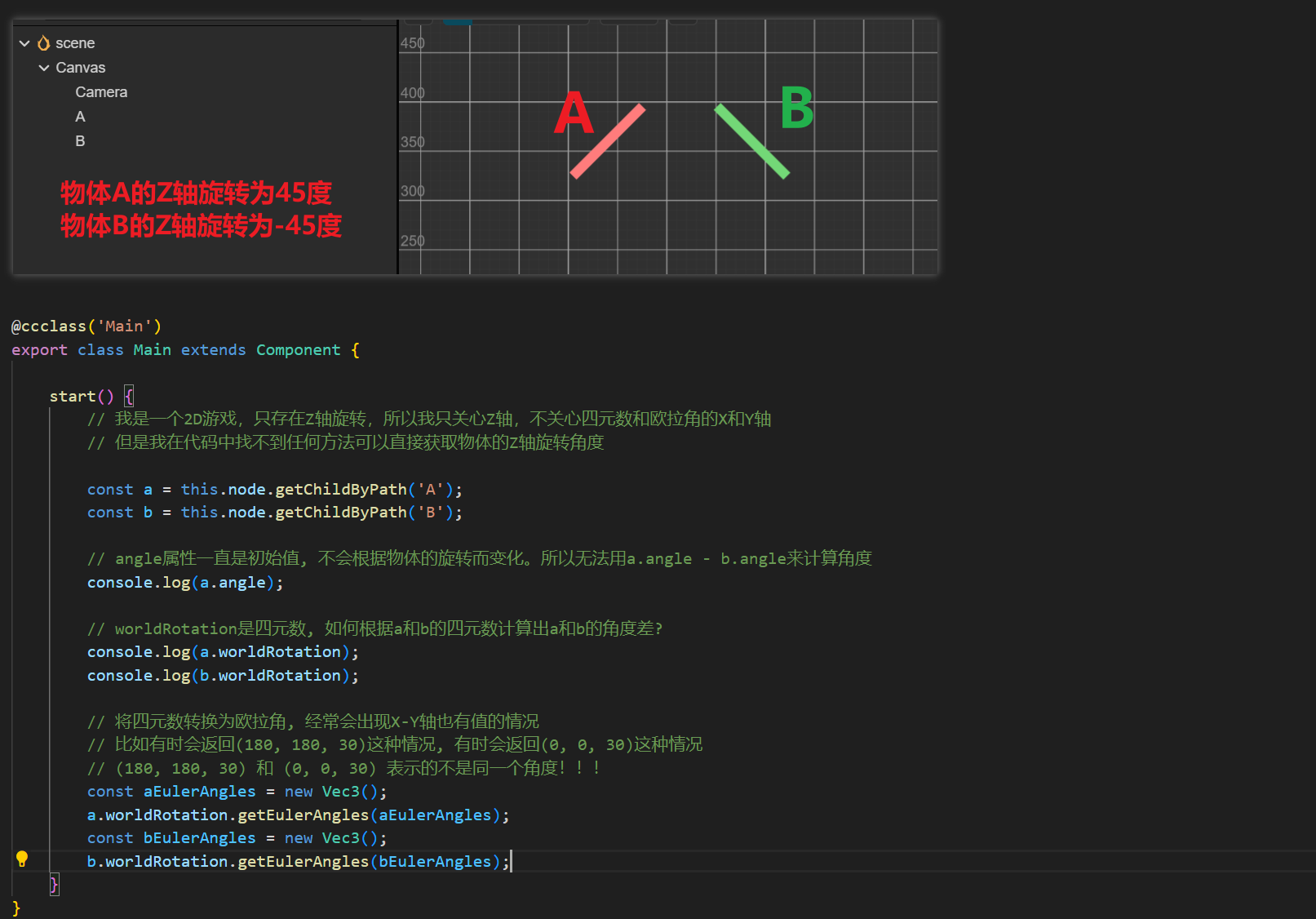
// 将四元数转换为角度, 角度范围为[0-360)
export function quat_to_angle(q: Quat): number {
// Quat.getAxisAngle()可以获取四元数对应的旋转轴和旋转弧度
// rad为弧度, 范围是[0, 2*PI), 这是确定的, 我看了源代码
let axis = new Vec3();
const rad = Quat.getAxisAngle(axis, q);
// 如果rad为0或者2*PI, 则直接返回0, 因为此时的axis是没有意义的
if (rad < 0.000001 || 2 * Math.PI - rad < 0.000001) {
return 0;
}
// 2D游戏中, 只有z轴旋转, x和y轴的值应该(也许,大概,差不多)为0
// *********************这是我通过观察后得到的结论, 源码中的数学公式看不懂, 我无法证明!!!!!!!!!!!
// 如果我的结论正确的话, 那么2D游戏的旋转轴只有两种情况:(0,0,1)和(0,0,-1)
if (Math.abs(axis.x) > 0.001 || Math.abs(axis.y) > 0.001) {
console.error('quat_to_angle error', axis.x, axis.y, axis.z, rad);
return 0;
}
// 将弧度转换为角度
const a = rad / Math.PI * 180;
// 如果旋转轴是Z轴的负方向, 则需要转化一下角度
if (axis.z < 0) {
return 360 - a;
}
return a;
}
// 将角度规范到[0-360)之间
export function normalized_angle_360(a: number): number {
while (a < 0) {
a += 360;
}
while (a >= 360) {
a -= 360;
}
return a;
}
// 将角度规范到[0-180]U(-180,0)之间
export function normalized_angle_180(a: number): number {
a = normalized_angle_360(a);
if (a > 180) {
a -= 360;
}
return a;
}
// 获取关节角度
// three_hundred_and_sixty为true的话, 返回的范围是[0-360)
// three_hundred_and_sixty为false的话, 返回的范围是[0-180]U(-180,0)
export function get_joint_angle(joint: HingeJoint2D, three_hundred_and_sixty: boolean = false): number {
const a1 = quat_to_angle(joint.node.worldRotation);
let a = a1;
if (joint.connectedBody != null) {
const a2 = quat_to_angle(joint.connectedBody.node.worldRotation);
a = a1 - a2;
}
if (three_hundred_and_sixty) {
a = normalized_angle_360(a);
} else {
a = normalized_angle_180(a);
}
return a;
}