
热点位置:
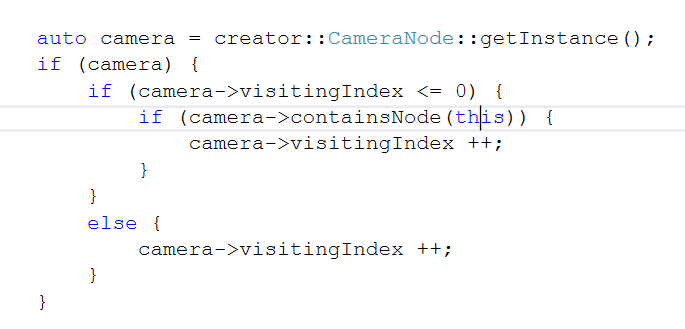
对于所有的CCNode, 在visit的时候都去相机这里检查containsNode, 而且里面还是双重遍历, 从本节点沿着父节点一直找到没有父节点为止, 每次扫描一个vector. 节点多了的时候卡的很厉害.
优化方向:
不是每次visit的时候判断是不是相机影响的节点, 而是只在这个受相机影响状态改变的时候搞个成员变量设置一下.
mark
类似这种代码多了去了,自己改吧
主要是不希望再给 CCNode 加个成员变量了。。。这里确实再可以优化下
像2D的camera是非常简单的,建议自己写一个。
引擎依赖越小就越主动
如果引擎没有提供相机的话可以自己搞一下啊, 不过引擎提供了就用吧.
项目还在开发中, 发现需要优化的地方就提出来.
如果已经上线了可能就不能等, 自己搞了.
求分享.
自己写的只能模拟达到看上去的相机效果,底层不一样啊,性能是大问题。