
《游戏人工智能编程案例精粹》Cocos Creator版 项目快速复用参考
本文是Cocos Store商店资源“《游戏人工智能编程案例精粹》(PGame AI by Example)”,项目快速复用参考指南。重在帮助大家快速复用资源内的AI技术到自己的项目中。下面将分几个模块详细说明。
有限状态机(FSM)
几乎所有类型的游戏,都能用到状态机技术。StateMachine类封装了状态管理类,内含当前状态信息。State类是具体状态的接口定义。为游戏内需要拥有状态的实体,实例化一个StateMachine对象,然后再实现具体的State类型,便可以轻松控制实体状态转换。
状态机的重点在于具体状态的实现,资源内的《简单足球》游戏,大量使用了状态机逻辑,可以参照该游戏来使用状态机。
/**
* 状态管理类
*/
@ccclass('StateMachine')
export class StateMachine<T> {
private _owner: T = null; // 拥有次状态机的实例
private _currentState: State<T> = null; //当前状态
private _previousState: State<T> = null; //之前的一个状态
private _globalState: State<T> = null; //全局状态
constructor(owner: T) {
this._owner = owner;
}
...
update() {
if (this._globalState) {
this._globalState.Execute(this._owner);
}
if (this._currentState) {
this._currentState.Execute(this._owner);
}
}
/**
* 处理消息
*/
handleMessage(msg: Telegram): boolean {
if (this._currentState && this._currentState.OnMessage(this._owner, msg)) {
return true;
}
if (this._globalState && this._globalState.OnMessage(this._owner, msg)) {
return true;
}
return false;
}
/**
* 改变当前状态
*/
changeState(newState: State<T>) {
assert(!!newState, "<StateMachine::ChangeState>:trying to assign null state to current");
this._previousState = this._currentState;
this._currentState.Exit(this._owner);
this._currentState = newState;
this._currentState.Enter(this._owner);
}
/**
* 切换到上一个状态
*/
revertToPreviousState() {
this.changeState(this._previousState);
}
...
}
//State接口类
export interface State<T> {
/**
* 进入状态时执行
* @param T
*/
Enter(T);
/**
* 每个更新周期都要执行
* @param T
*/
Execute(T);
/**
* 退出状态时执行
* @param T
*/
Exit(T);
/**
* 收到dispatcher的消息时,执行
* @param T
*/
OnMessage(T, Telegram): boolean;
}
下面2个例子,分别是球队自身的进攻状态,队员带球状态的逻辑实现
/**
* 球队进攻状态
*/
@ccclass('SoccerTeamAttackingState')
export class SoccerTeamAttackingState implements State<SoccerTeam> {
private static _instance: SoccerTeamAttackingState = null;
public static instance(): SoccerTeamAttackingState {
if (this._instance == null) {
this._instance = new SoccerTeamAttackingState();
}
return this._instance;
}
private constructor() {}
/**
* 进入状态时执行
*/
Enter(team: SoccerTeam) {
SoccerPitch.debugInfoPrint(`Team(${team.getName()}) entering Attacking state`);
// 设置队伍成员到进攻区域
if (team.color == SoccerTeamColor.blue) {
let attackRegionIDs = [1, 12, 14, 6, 4];
team.changeMembersHomeRegionID(attackRegionIDs);
} else if (team.color == SoccerTeamColor.red) {
let attackRegionIDs = [16, 3, 5, 9, 13];
team.changeMembersHomeRegionID(attackRegionIDs);
}
// 重设队伍中,处于等待状态的成员的,操控行为的目标
team.updateSteeringTargetOfWaitingPlayers();
}
/**
* 每个更新周期都要执行
*/
Execute(team: SoccerTeam) {
// 如果不在处于控球状态,更改队伍状态为防守
if (!team.isInControl()) {
team.getFSM().changeState(SoccerTeamDefendingState.instance());
return;
}
// 仍处于控球状态时,更新最佳支援点位的信息
team.determineBestSupportingPosition();
}
/**
* 退出状态时执行
*/
Exit(team: SoccerTeam) {
// 重置支援成员
team.supportingPlayer = null;
}
/**
* 收到dispatcher的消息时,执行
*/
OnMessage(team: SoccerTeam, msg: Telegram): boolean {
return false;
}
}
/**
* 球员带球状态
*/
@ccclass('SoccerPlayerDribbleState')
export class SoccerPlayerDribbleState implements State<SoccerFieldPlayer> {
private static _instance: SoccerPlayerDribbleState = null;
public static instance(): SoccerPlayerDribbleState {
if (this._instance == null) {
this._instance = new SoccerPlayerDribbleState();
}
return this._instance;
}
private constructor() {}
/**
* 状态名称
*/
Name(): string {
return 'Dribble';
}
/**
* 进入状态时执行
*/
Enter(player: SoccerFieldPlayer) {
// 更新球队控球成员
player.team.controllingPlayer = player;
SoccerPitch.debugInfoPrint(`Player(${player.id}) enters dribble state`);
}
/**
* 每个更新周期都要执行
*/
private static _executeTempVec: Vec3 = new Vec3();
Execute(player: SoccerFieldPlayer) {
let dot = player.team.homeGoal.facing.dot(player.heading);
if (dot < 0) {
// 带球方案选择,如果朝向面向自己的半场,则将球朝对方球门的方向控制
let direction = SoccerPlayerDribbleState._executeTempVec;
direction.set(player.heading);
let angleSign = Util.vecRotateZSign(player.team.homeGoal.facing, player.heading);
let angle = Math.PI * 0.25 * -1; //旋转45度
angle *= angleSign;
Vec3.rotateZ(direction, direction, Vec3.ZERO, angle);
// 朝该旋转后的方向,踢球
let kickingForce = 96; // 貌似该大小的力,能获得比较好的效果
player.ball.kick(direction, kickingForce);
SoccerPitch.debugInfoPrint(`Player(${player.id}) Dribble kick dot(${dot}) angle(${angle}) dir(${direction}) head(${player.heading})`);
} else {
// 朝向面向对方球门,向对方球门方向带球
player.ball.kick(player.team.homeGoal.facing, Constant.Soccer_Max_Dribble_Force);
SoccerPitch.debugInfoPrint(`Player(${player.id}) Dribble kick dot(${dot}) dir(${player.team.homeGoal.facing}) head(${player.heading})`);
}
// 无论如何,都已经踢了球了,需要改变为追球状态
player.getFSM().changeState(SoccerPlayerChaseBallState.instance());
return;
}
/**
* 退出状态时执行
*/
Exit(player: SoccerFieldPlayer) {
}
/**
* 收到dispatcher的消息时,执行
*/
OnMessage(player: SoccerFieldPlayer, msg: Telegram): boolean {
return false;
}
}
操控行为
操控行为使智能体可以自治运动的方式,原书提供了十几种操控行为,Chapter3/SteeringBehaviors.ts文件,包含了对每一类操控行为的实现。游戏项目中一般不会用到所有的操控行为。简单足球游戏只用到了里面的5种行为。要在项目内快速使用操控行为话,可以将SteeringBehaviors类型通过模板参数进一步封装。
SteeringBehaviors类的绝大部分实现,都是可以直接用在项目中的,下面简单列一下可以复用的相关代码。
// 操控行为类型
export enum SoccerBehaviorType {
none = 0,
seek = 1 << 1,
arrive = 1 << 2,
separation = 1 << 3,
pursuit = 1 << 4,
interpose = 1 << 5,
}
// 足球队员用操控行为类
@ccclass('SoccerSteeringBehaviors')
export class SoccerSteeringBehaviors {
private _player: SoccerPlayerBase = null; // 行为对应的玩家
private _ball: SoccerBall = null; // 足球实体
private _steeringForce: Vec3 = new Vec3(); // 操控力
private _targetPos: Vec3 = new Vec3(); // 目标位置
// 是否开启指定类型的控制行为
private on(bType: SoccerBehaviorType): boolean {
return (this._flags & bType) == bType;
}
// 开启指定类型的控制行为
private onType(bType: SoccerBehaviorType) {
this._flags |= bType;
}
// 关闭指定类型的控制行为
private offType(bType: SoccerBehaviorType) {
if (this.on(bType)) {
this._flags ^= bType;
}
}
/**
* 开启各行为
*/
seekOn() {
this.onType(SoccerBehaviorType.seek);
}
pursuitOn() {
this.onType(SoccerBehaviorType.pursuit);
}
/**
* 关闭各行为
*/
seekOff() {
this.offType(SoccerBehaviorType.seek);
}
pursuitOff() {
this.offType(SoccerBehaviorType.pursuit);
}
/**
* 判断各行为是否开启
*/
seekIsOn(): boolean {
return this.on(SoccerBehaviorType.seek);
}
pursuitIsOn(): boolean {
return this.on(SoccerBehaviorType.pursuit);
}
...
/**
* 实现seek(前往)行为
*/
private seekBH(target: Vec3): Vec3 {
let desireVelocity = new Vec3();
Vec3.subtract(desireVelocity, target, this._player.pos);
desireVelocity.normalize();
desireVelocity.multiplyScalar(this._player.maxSpeed);
desireVelocity.subtract(this._player.velocity);
return desireVelocity;
}
/**
* 实现pursuit(追逐足球)行为
*/
private pursuitBH(ball: SoccerBall): Vec3 {
let toBall = SoccerSteeringBehaviors._logicTempVec;
Vec3.subtract(toBall, ball.pos, this._player.pos);
// 预判位置,预判时间正比于距离,反比于速度
let lookAheadTime = 0;
if (ball.speed() > math.EPSILON) {
lookAheadTime = toBall.length() / ball.speed();
}
this._targetPos.set(ball.futurePosition(lookAheadTime));
return this.arriveBH(this._targetPos, SoccerDeceleration.fast);
}
}
// 尝试将力加到总转向力上,最大不超过maxforce,返回加成功与否
private accumulateForce(totalForceVec: Vec3, forceAddVec: Vec3): boolean {
let remainForce = this._player.maxForce - totalForceVec.length();
if (remainForce < math.EPSILON) return false;
let wantAddForce = forceAddVec.length();
if (wantAddForce < remainForce) {
totalForceVec.add(forceAddVec);
} else {
let canAddVec = new Vec3();
Vec3.normalize(canAddVec, forceAddVec);
canAddVec.multiplyScalar(remainForce);
totalForceVec.add(canAddVec);
}
return true;
}
/**
* 计算各操控力合并到一起的效果,受到maxforce限制
*/
private sumForces(): Vec3 {
// 分操控类型计算合力
let totalForce = new Vec3();
let force:Vec3 = null;
// 前往行为产生的力
if (this.on(SoccerBehaviorType.seek)) {
force = this.seekBH(this._targetPos);
force.multiplyScalar(Constant.Soccer_BH_Force_Tweaker);
if (!this.accumulateForce(totalForce, force)) {
return totalForce;
}
}
// 追逐行为产生的力
if (this.on(SoccerBehaviorType.pursuit)) {
force = this.pursuitBH(this._ball);
force.multiplyScalar(Constant.Soccer_BH_Force_Tweaker);
if (!this.accumulateForce(totalForce, force)) {
return totalForce;
}
}
return totalForce;
}
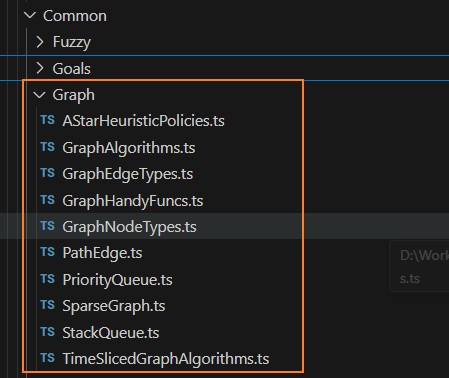
图相关算法
资源script/Common/Graph文件夹里面的文件,包含了图的构建类、各种图搜索算法、常用函数。Graph整个目录都可以拷贝到自己的项目中,直接使用。下面简单介绍下每个文件所包含的内容。
GraphNodeType.ts
包含图节点的实现类。GraphNode是节点基础类,NavGraphNode是导航图节点类,可以在此进一步扩展项目需要的图节点类型。
/**
* 基础图节点类
*/
@ccclass('GraphNode')
export class GraphNode {
protected _index; // 节点索引,>= 0
constructor();
constructor(idx: number);
constructor(idx?: number) {
this._index = idx ?? invalidNodeIndex;
}
get index(): number {
return this._index;
}
set index(idx: number) {
this._index = idx;
}
...
}
/**
* 导航图用图节点
*/
@ccclass('NavGraphNode')
export class NavGraphNode<T = null> extends GraphNode {
protected _position: Vec3 = new Vec3(); //节点所在导航图中的坐标
protected _extraInfo: T = null; // 扩展信息
constructor();
constructor(idx: number, pos: Vec3, extraInfo?: T);
constructor(idx?: number, pos?: Vec3, extraInfo: T = null) {
super(idx);
this._position.set(pos ?? Vec3.ZERO);
this._extraInfo = extraInfo ?? null;
}
get pos(): Vec3 {
return this._position;
}
set pos(pos: Vec3) {
this._position.set(pos);
}
get extraInfo(): T {
return this._extraInfo;
}
set extraInfo(info: T) {
this._extraInfo = info;
}
...
}
GraphEdgeTypes.ts
包含图节点之间连接边的实现类。GraphEdge是连接边基础类,NavGraphEdge是导航图连接边类,可以在此进一步扩展项目需要的图节点连接边类型。
/**
* 基础图节点连接之边类
*/
@ccclass('GraphEdge')
export class GraphEdge {
protected _from: number; // 边起始位置的节点索引
protected _to: number; // 边结束位置的节点索引
protected _cost: number; // 经过该边的开销
constructor();
constructor(from: number, to: number);
constructor(from: number, to: number, cost: number);
constructor(from?: number, to?: number, cost?: number) {
this._from = from ?? invalidNodeIndex;
this._to = to ?? invalidNodeIndex;
this._cost = cost ?? 1;
}
get from(): number {
return this._from;
}
set from(idx: number) {
this._from = idx;
}
get to(): number {
return this._to;
}
set to(idx: number) {
this._to = idx;
}
get cost(): number {
return this._cost;
}
set cost(newCost: number) {
this._cost = newCost;
}
/**
* 判断与指定的边,是否是同一个边
*/
public equal(rhs: GraphEdge) {
return (rhs._from == this._from) &&
(rhs._to == this._to) &&
(rhs._cost == this._cost);
}
/**
* 连接边的小于号比较函数
*/
public static lessThanFunc(lhs: GraphEdge, rhs: GraphEdge) {
return lhs.cost < rhs.cost;
}
}
/**
* 导航图用图节点连接边类
*/
export class NavGraphEdge extends GraphEdge {
protected _flags: number = 0; // 边类型标记
protected _idOfIntersectingEntity: number = -1; //如果边与对象相交(比如门或电梯),则此处存放该对象的id
constructor();
constructor(from: number, to: number, cost: number, flags?: number, id?: number)
constructor(from?: number, to?: number, cost?: number, flags: number = 0, id: number = -1) {
super(from, to, cost);
this._flags = flags;
this._idOfIntersectingEntity = id;
}
get flags(): number {
return this._flags;
}
set flags(newFlags: number) {
this._flags = newFlags;
}
get idOfIntersectingEntity(): number {
return this._idOfIntersectingEntity;
}
set idOfIntersectingEntity(id: number) {
this._idOfIntersectingEntity = id;
}
}
SparseGraph.ts
SparseGraph实现了稀疏图类型,复用该类型,可以快速产出项目内需要的图对象。
// 稀疏图
@ccclass('SparseGraph')
export class SparseGraph<NodeType extends GraphNode, EdgeType extends GraphEdge> {
private _nodes: GraphNodeArr<NodeType> = new Array<NodeType>(); // 图节点数组
private _edges: GraphEdageListArr<EdgeType> = new Array<Array<EdgeType>>(); // 图各节点连接边列表组成的数组
private _digraph: boolean = false; // 是否为有向图
private _nextNodeIndex: number = 0; // 下一节点的索引值
private _nodeFactory: GraphNodeFactory = null; // 节点创建用工厂函数
private _edgeFactory: GraphEdgeFactory = null; // 连接边创建用工厂函数
constructor(digraph: boolean, nodeFactory: GraphNodeFactory, edgeFactory: GraphEdgeFactory) {
this._digraph = digraph;
this._nextNodeIndex = 0;
this._nodeFactory = nodeFactory;
this._edgeFactory = edgeFactory;
}
get nodes(): GraphNodeArr<NodeType> {
return this._nodes;
}
get edges(): GraphEdageListArr<EdgeType> {
return this._edges;
}
...
// 取得指定索引的节点
getNode(idx: number): NodeType {
assert(idx >= 0 && idx < this._nodes.length, `<SparseGraph::GetNode>: invalid index(${idx})`);
return this._nodes[idx];
}
// 取得指定的边数据
getEdge(from: number, to: number): EdgeType {
// 索引有效性校验
assert(from >= 0 && from < this._nodes.length && this._nodes[from].index != invalidNodeIndex,
`<SparseGraph::GetEdge>: invalid 'from' index(${from})`);
assert(to >= 0 && to < this._nodes.length && this._nodes[to].index != invalidNodeIndex,
`<SparseGraph::GetEdge>: invalid 'to' index(${to})`);
for (let curEdge of this._edges[from]) {
if (curEdge.to == to) {
return curEdge;
}
}
assert(false, `<SparseGraph::GetEdge>: edge does not exist, from(${from}) to(${to})`);
return null;
}
// 取得节点对应的边列表
getNodeEdgeList(idx: number): GraphEdgeList<EdgeType> {
}
// 判断图中是否尚不存在指定的边,如果不存在则返回true
private uniqueEdge(from: number, to: number): boolean {
}
// 删除当前图中的所有指向无效节点的边
private cullInvalidEdges() {
}
// 添加新的图节点
addNode(node: NodeType): number {
}
// 删除指定索引的节点
removeNode(nodeIdx: number) {
}
// 添加新的边
addEdge(edge: EdgeType) {
}
// 删除指定边
removeEdge(from: number, to: number) {
}
// 设置边的开销
setEdgeCost(from: number, to: number, costN: number) {
}
// 取得激活的节点数量
numActiveNodes(): number {
}
// 取得边的总数
numEdges(): number {
}
// 校验指定索引的节点是否存在
isNodePresent(idx: number): boolean {
}
// 校验指定边数据是否存在
isEdgePresent(from: number, to: number): boolean {
}
// 清空当前图的所有数据
clear() {
}
// 清空图内的所有边数据
removeEdges() {
}
}
GraphAlgorithms.ts
包含图的几种搜索算法,深度优先遍历(GraphSearchDFS)、广度优先遍历(GraphSearchBFS)、Dijkstra搜索算法(GraphSearchDijkstra)、A星寻路算法(GraphSearchAStar),项目内常用Dijkstra、A星寻路算法。
/**
* 深度优先遍历
*/
@ccclass('GraphSearchDFS')
export class GraphSearchDFS<NodeType extends GraphNode, EdgeType extends GraphEdge> {
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _visited: Array<number> = null; // 对应图节点访问与否的标记
private _route: Array<number> = null; // 节点到父节点的路由,key为节点索引,val为该节点对应的父节点
private _spanningTree: Array<EdgeType> = []; // 搜索过程中经过的边,组成的tree列表
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
private _found: boolean = false; // 是否搜索到了目标节点
constructor(graph: SparseGraph<NodeType, EdgeType>, sourceIdx: number, targetIdx: number = invalidNodeIndex) {
...
}
get found(): boolean {
}
/**
* 取得深度遍历搜索过程中的边列表
*/
getSearchTree(): Array<EdgeType> {
return this._spanningTree;
}
/**
* 开始深度优先遍历搜索
*/
search(): boolean {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
}
/**
* 广度优先遍历
*/
@ccclass('GraphSearchBFS')
export class GraphSearchBFS<NodeType extends GraphNode, EdgeType extends GraphEdge> {
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _visited: Array<number> = null; // 对应图节点访问与否的标记
private _route: Array<number> = null; // 节点到父节点的路由,key为节点索引,val为该节点对应的父节点
private _spanningTree: Array<EdgeType> = []; // 搜索过程中经过的边,组成的tree列表
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
private _found: boolean = false; // 是否搜索到了目标节点
constructor(graph: SparseGraph<NodeType, EdgeType>, sourceIdx: number, targetIdx: number = invalidNodeIndex) {
...
}
get found(): boolean {
}
/**
* 取得广度遍历搜索过程中的边列表
*/
getSearchTree(): Array<EdgeType> {
return this._spanningTree;
}
/**
* 开始广度优先遍历搜索
*/
search(): boolean {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
}
/**
* Dijkstra搜索算法
*/
@ccclass('GraphSearchDijkstra')
export class GraphSearchDijkstra<NodeType extends GraphNode, EdgeType extends GraphEdge> {
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _shortestPathTree: Array<EdgeType> = null; // 最短路径树
private _costToThisNode: Array<number> = null; // 到各节点的最短路径消耗
private _searchFrontier: Array<EdgeType> = null; // 跟SPT相连,但尚未放到SPT的边。每个节点索引,最多只保留一个最优解的边
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
constructor(graph: SparseGraph<NodeType, EdgeType>, sourceIdx: number, targetIdx: number = invalidNodeIndex) {
...
}
/**
* 重置
*/
reset(sourceIdx: number, targetIdx: number = invalidNodeIndex) {
}
/**
* 取得最短路径树
*/
getSPT(): Array<EdgeType> {
}
/**
* 取得到目标节点的总消耗
*/
getCostToTarget(): number {
}
/**
* 取得到指定节点的总消耗
*/
getCostToNode(idx: number): number {
return this._costToThisNode[idx];
}
/**
* 开始Dijkstra搜索
*/
search() {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
}
// A星寻路启发处理函数类型
export type AStarHeuristicFunc<NodeType extends GraphNode, EdgeType extends GraphEdge> =
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number) => number;
/**
* A星寻路算法
*/
@ccclass('GraphSearchAStar')
export class GraphSearchAStar<NodeType extends GraphNode, EdgeType extends GraphEdge> {
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _shortestPathTree: Array<EdgeType> = null; // 最短路径树
private _searchFrontier: Array<EdgeType> = null; // 跟SPT相连,但尚未放到SPT的边。每个节点索引,最多只保留一个最优解的边
private _GCostToThisNode: Array<number> = null; // 到各节点的最短路径消耗
private _FCostToThisNode: Array<number> = null; // 到各节点的最短路径消耗 + (各节点与目标节点,通过启发处理计算后的消耗) = 总值
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
private _heuristicFunc: AStarHeuristicFunc<NodeType, EdgeType> = null; // 启发处理函数
constructor(graph: SparseGraph<NodeType, EdgeType>,
heuristicFunc: AStarHeuristicFunc<NodeType, EdgeType>,
sourceIdx: number, targetIdx: number)
{
...
}
/**
* 取得最短路径树
*/
getSPT(): Array<EdgeType> {
}
/**
* 取得到目标节点的总消耗
*/
getCostToTarget(): number {
}
/**
* 开始A星搜索
*/
search() {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
}
TimeSlicedGraphAlgorithms.ts
包含Dijkstra、A星寻路算法的时间片实现版。在处理大量寻路请求时,通过时间片处理,可以将多个寻路请求分化到多帧处理,避免游戏卡顿。资源内的Raven游戏,提供了时间片算法使用的例子。
/**
* 时间片路径搜索的状态枚举
*/
export enum TimeSlicedSearchState {
searIncomplete, // 搜索尚未完成
targetFound, // 已经发现目标
targetNotFound, // 未发现目标
}
/**
* 搜索算法种类
*/
export enum TimeSlicedSearchType {
AStar, // A星寻路
Dijkstra, // Dijkstra算法
}
/**
* 时间片搜索算法基类
*/
@ccclass('GraphSearchTimeSliced')
export abstract class GraphSearchTimeSliced<EdgeType> {
private _searchType: TimeSlicedSearchType = null; // 搜索类型
constructor(searchType: TimeSlicedSearchType) {
this._searchType = searchType;
}
get searchType(): TimeSlicedSearchType {
return this._searchType;
}
/**
* 取得目标索引
*/
abstract targetIdx(): number;
/**
* 单步搜索
*/
abstract cycleOnce(): TimeSlicedSearchState;
/**
* 取得搜索树
*/
abstract getSPT(): Array<EdgeType>;
/**
* 返回到目标点的消耗
*/
abstract getCostToTarget(): number;
/**
* 取得到达目标的节点索引列表
*/
abstract getPathToTarget(): Array<number>;
/**
* 取得到达目标的路径
*/
abstract getPathAsPathEdges(): Array<PathEdge>;
}
/**
* 时间片实现:A星寻路算法
*/
@ccclass('GraphSearchAStarTS')
export class GraphSearchAStarTS<NodeType extends GraphNode, EdgeType extends GraphEdge>
extends GraphSearchTimeSliced<EdgeType>
{
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _shortestPathTree: Array<EdgeType> = null; // 最短路径树
private _searchFrontier: Array<EdgeType> = null; // 跟SPT相连,但尚未放到SPT的边。每个节点索引,最多只保留一个最优解的边
private _GCostToThisNode: Array<number> = null; // 到各节点的最短路径消耗
private _FCostToThisNode: Array<number> = null; // 到各节点的最短路径消耗 + (各节点与目标节点,通过启发处理计算后的消耗) = 总值
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
private _heuristicFunc: AStarHeuristicFunc<NodeType, EdgeType> = null; // 启发处理函数
private _pq: IndexPriorityQueue<number> = null; // 搜索用索引优先队列
constructor(graph: SparseGraph<NodeType, EdgeType>,
heuristicFunc: AStarHeuristicFunc<NodeType, EdgeType>,
sourceIdx: number, targetIdx: number)
{
...
}
/**
* 取得目标索引
*/
targetIdx(): number {
}
/**
* 取得最短路径树
*/
getSPT(): Array<EdgeType> {
}
/**
* 取得到目标节点的总消耗
*/
getCostToTarget(): number {
}
/**
* 开始A星搜索
*/
cycleOnce(): TimeSlicedSearchState {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
/**
* 取得到达目标的路径
*/
getPathAsPathEdges(): Array<PathEdge> {
}
}
// Dijkstra算法终止条件判定函数类型
export type DijkstraStopConditionFunc<NodeType extends GraphNode, EdgeType extends GraphEdge> =
(graph: SparseGraph<NodeType, EdgeType>, target: number, curNodeIdx: number) => boolean;
/**
* 时间片实现:Dijkstra搜索算法
*/
@ccclass('GraphSearchDijkstraTS')
export class GraphSearchDijkstraTS<NodeType extends GraphNode, EdgeType extends GraphEdge>
extends GraphSearchTimeSliced<EdgeType>
{
private _graph: SparseGraph<NodeType, EdgeType> = null; // 引用的图
private _shortestPathTree: Array<EdgeType> = null; // 最短路径树
private _costToThisNode: Array<number> = null; // 到各节点的最短路径消耗
private _searchFrontier: Array<EdgeType> = null; // 跟SPT相连,但尚未放到SPT的边。每个节点索引,最多只保留一个最优解的边
private _sourceIdx: number = invalidNodeIndex; // 搜索的起始节点索引
private _targetIdx: number = invalidNodeIndex; // 搜索的目标节点索引
private _stopConditionFunc: DijkstraStopConditionFunc<NodeType, EdgeType> = null; // 终止条件判定函数
private _pq: IndexPriorityQueue<number> = null; // 搜索用索引优先队列
constructor(graph: SparseGraph<NodeType, EdgeType>,
stopConditionFunc: DijkstraStopConditionFunc<NodeType, EdgeType>,
sourceIdx: number, targetIdx: number = invalidNodeIndex)
{
...
}
/**
* 取得目标索引
*/
targetIdx(): number {
}
/**
* 取得最短路径树
*/
getSPT(): Array<EdgeType> {
}
/**
* 取得到目标节点的总消耗
*/
getCostToTarget(): number {
}
/**
* 取得到指定节点的总消耗
*/
getCostToNode(idx: number): number {
}
/**
* 开始Dijkstra搜索
*/
cycleOnce(): TimeSlicedSearchState {
}
/**
* 取得有起始点到目标点组成的节点索引列表
*/
getPathToTarget(): Array<number> {
}
/**
* 取得到达目标的路径
*/
getPathAsPathEdges(): Array<PathEdge> {
}
}
GraphHandyFuncs.ts
GraphHandyFuncs类包含图对象相关辅助函数,其中createGridByFloodFill接口,通过洪水填充算法,可以动态生成项目内需要的导航图信息。
/**
* 图对象用辅助函数类
*/
@ccclass('GraphHandyFuncs')
export class GraphHandyFuncs {
//禁止生成实例对象
private constructor() {}
/**
* 校验是否是图内有效的邻居节点
*/
public static validNbr(x: number, y: number, numCellsX: number, numCellsY: number): boolean {
}
/**
* 辅助创建网格布局中的图形节点的8条相邻边
*/
public static Helper_AddNbrEdgesToGridNode<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, row: number, col: number, numCellsX: number, numCellsY: number)
{
}
/**
* 辅助创建网格布局中的图(节点顺序从左上到右下)
*/
public static Helper_CreateGrid<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, gridWidth: number, gridHeight: number,
numCellsX: number, numCellsY: number, gridStartX: number, gridStartY: number)
{
}
/**
* 辅助绘制网格布局中的图
*/
public static Helper_DrawGrid<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graphics: Graphics, graph: SparseGraph<NodeType, EdgeType>, color: math.Color = new math.Color('E0E3DA'))
{
}
/**
* 指定导航图的节点,根据连接边的长度、指定权重值,设置连接边的消耗值。常用设置地形成本
*/
public static weightNavGraphNodeEdges<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, nodeIdx: number, weight: number)
{
}
/**
* 计算导航图中连接边的平均长度,使用节点间的实际长度,而不是cost来计算
*/
public static calcNavGraphEdgesAverLength<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>): number
{
}
/**
* 创建从一个节点到其他所有节点的消耗成本的对照表
*/
public static createAllPairsCostsTable<NodeType extends GraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>): Array<Array<number>>
{
}
/**
* 取得图里消耗最大的连接边
*/
public static getCostliestGraphEdge<NodeType extends GraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>): EdgeType
{
}
/**
* 洪水填充算法,构建导航图数据
*/
public static createGridByFloodFill<T, NodeType extends NavGraphNode<T>, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, firstNodePos: Vec3, edgeLen: number, extraLen: number, wallPrefArr: Array<WallPref>)
{
let catchPos2NodeMap = new Map<string, NodeType>();
let waitHandlePosQueue = new StackQueue<Vec3>();
// 第一个节点先入队列
[firstNodePos.x, firstNodePos.y] = [Math.floor(firstNodePos.x), Math.floor(firstNodePos.y)];
let newNode = graph.nodeFactory(graph.nextFreeNodeIndex, {pos: firstNodePos});
graph.addNode(newNode as NodeType);
let cposKey = `${firstNodePos.x}_${firstNodePos.y}`;
catchPos2NodeMap.set(cposKey, newNode as NodeType);
waitHandlePosQueue.push(firstNodePos.clone());
// 依次处理队列中的节点信息
while (!waitHandlePosQueue.empty()) {
// 将队首节点可连接的节点,添加进图
let handlePos = waitHandlePosQueue.pop();
let connectPosList = this.getConnectEdgeNodePosList(handlePos, edgeLen);
for (let cpos of connectPosList) {
// 排除跟墙壁相交的点
if (this.checkEdgeCrossWall(handlePos, cpos, extraLen, wallPrefArr)) continue;
// 添加节点
cposKey = `${cpos.x}_${cpos.y}`;
let isNewPos = !catchPos2NodeMap.has(cposKey);
if (isNewPos) {
newNode = graph.nodeFactory(graph.nextFreeNodeIndex, {pos: cpos});
graph.addNode(newNode as NodeType);
catchPos2NodeMap.set(cposKey, newNode as NodeType);
waitHandlePosQueue.push(cpos.clone());
}
// 添加边
let handleKey = `${handlePos.x}_${handlePos.y}`;
let handleNode = catchPos2NodeMap.get(handleKey);
let cposNode = catchPos2NodeMap.get(cposKey);
if (!graph.isEdgePresent(handleNode.index, cposNode.index)) {
let dist = Vec3.distance(handlePos, cpos);
let newEdge = graph.edgeFactory(handleNode.index, cposNode.index, dist);
graph.addEdge(newEdge as EdgeType);
}
}
}
}
/**
* 取得跟指定节点相连接的8个边节点的坐标数据
*/
private static _edgeNodePosList:Array<Vec3> = null;
private static getConnectEdgeNodePosList(nodePos: Vec3, edgeLen: number): Array<Vec3> {
}
/**
* 检测导航图边是否与墙壁相交
*/
private static _checkEdgeCrossBox: geometry.AABB = new AABB();
private static _checkEdgeCrossMid: Vec3 = new Vec3();
private static checkEdgeCrossWall(from: Vec3, to: Vec3, extraLen: number, wallPrefArr: Array<WallPref>): boolean {
}
}
AStarHeuristicPolicies.ts
包含A星寻路算法经常使用到的,各类启发因子函数的实现类。
/**
* A星启发因子:欧几里得距离
*/
@ccclass('AStarHeuristic_Euclid')
export class AStarHeuristic_Euclid {
private constructor() {}
public static calculate<NodeType extends NavGraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
return Vec3.distance(graph.getNode(idx1).pos, graph.getNode(idx2).pos);
}
}
/**
* A星启发因子:欧几里得距离,增加一定量的噪声
*/
@ccclass('AStarHeuristic_NoisyEuclid')
export class AStarHeuristic_NoisyEuclid {
private constructor() {}
public static calculate<NodeType extends NavGraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
return Vec3.distance(graph.getNode(idx1).pos, graph.getNode(idx2).pos) * Util.getRandomFloat(0.9, 1.1);
}
}
/**
* A星启发因子:Dijkstra
*/
@ccclass('AStarHeuristic_Dijkstra')
export class AStarHeuristic_Dijkstra {
private constructor() {}
public static calculate<NodeType extends GraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
return 0;
}
}
/**
* A星启发因子:曼哈顿距离
*/
@ccclass('AStarHeuristic_Manhat')
export class AStarHeuristic_Manhat {
private constructor() {}
// 适合上下左右,四方向移动
public static calculate<NodeType extends NavGraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
let pos1 = graph.getNode(idx1).pos;
let pos2 = graph.getNode(idx2).pos;
return Math.abs(pos1.x - pos2.x) + Math.abs(pos1.y - pos2.y);
}
}
/**
* A星启发因子:对角线距离
*/
@ccclass('AStarHeuristic_Diagonal')
export class AStarHeuristic_Diagonal {
private constructor() {}
// 适合上、下、左、右、左上、右上、左下、右下,8方向移动,对角线移动消耗更多
public static calculate<NodeType extends NavGraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
let pos1 = graph.getNode(idx1).pos;
let pos2 = graph.getNode(idx2).pos;
let dx = Math.abs(pos1.x - pos2.x);
let dy = Math.abs(pos1.y - pos2.y);
return 10 * (dx + dy) - 6 * Math.min(dx, dy);
}
}
/**
* A星启发因子:切比雪夫距离
*/
@ccclass('AStarHeuristic_Chebyshev')
export class AStarHeuristic_Chebyshev {
private constructor() {}
// 适合上、下、左、右、左上、右上、左下、右下,8方向移动,且各方向移动消耗相同
public static calculate<NodeType extends NavGraphNode, EdgeType extends GraphEdge>
(graph: SparseGraph<NodeType, EdgeType>, idx1: number, idx2: number): number
{
let pos1 = graph.getNode(idx1).pos;
let pos2 = graph.getNode(idx2).pos;
let dx = Math.abs(pos1.x - pos2.x);
let dy = Math.abs(pos1.y - pos2.y);
return Math.max(dx, dy);
}
}
路径规划
PathManager、RavenPathPlanner类,被用于Raven游戏里面的路径规划管理,与时间片Dijkstra、A星寻路算法配合使用。虽然类内部设计是为Raven游戏内bot智能体所使用,但是经过简单修改,就可以用到自己的项目中。在处理大量寻路请求时,可以达到理想效果。
/**
* 统一调配所有路径规划实例
*/
@ccclass('PathManager')
export class PathManager {
private _searchRequests: Array<RavenPathPlanner> = []; // 所有请求搜索计划的列表
private _searchTimePerUpdate: number = 0; // 每次更新搜索时,最多占用的时间 ms
constructor(timeRatio: number) {
// 路径规划耗时占当前帧率时间的比例
if (timeRatio < 0.1) timeRatio = 0.1;
if (timeRatio > 0.5) timeRatio = 0.5;
let costTime = 1000 / (game.frameRate as number) * timeRatio;
this._searchTimePerUpdate = Math.max(1, costTime);
console.log(`PathManager searchTimePerUpdate ${costTime} ms`);
}
/**
* 更新当前搜索路径列表
*/
updateSearchs() {
...
}
/**
* 注册新的搜索计划
*/
register(pathPlanner : RavenPathPlanner) {
}
/**
* 注销指定的搜索计划
*/
unRegister(pathPlanner : RavenPathPlanner) {
}
/**
* 返回路径规划总量
*/
getActiveSearchesCount(): number {
}
}
/**
* Bot使用的路径规划类
*/
@ccclass('RavenPathPlanner')
export class RavenPathPlanner {
private _owner: RavenBot = null; // 实例所属Bot
private _graph: RavenSparseGraph = null; // 导航图
private _curSearch: GraphSearchTimeSliced<RavenGraphEdge> = null; // 对应搜索算法实例
private _destPos: Vec3 = new Vec3(); // 目标点位置
constructor(owner: RavenBot) {
...
}
/**
* 取得距离指定位置最近的节点索引
*/
private getClosestNodeToPositon(pos: Vec3): number {
}
/**
* 快速去除多余边来优化路径
*/
private smoothPathEdgesQuick(path: Array<PathEdge>) {
}
/**
* 精确去除多余边来优化路径
*/
private smoothPathEdgesPrecise(path: Array<PathEdge>) {
}
/**
* 为新的搜索做准备工作
*/
private getReadyFroNewSearch() {
}
/**
* 走一遍查找,根据查找结果,触发不同的消息
*/
cycleOnce(): TimeSlicedSearchState {
}
/**
* 取得路径中所有边信息
*/
getPath(): Array<PathEdge> {
}
/**
* 计算bot从当前位置,到达指定索引的节点,总消耗成本
*/
getCostToNode(idx: number): number {
}
/**
* 返回与给定类型实例最接近的实例的成本
*/
getCostToClosestItem(giverType: number): number {
}
/**
* Dij停止判定函数
*/
public static dijkstraStopConditionFunc(graph: RavenSparseGraph, target: number, curNodeIdx: number): boolean {
}
/**
* 请求创建到指定类型道具的路径,异步创建
*/
requestPathToItem(itemType: number): boolean {
}
/**
* 请求创建到目标位置的路径,异步创建
*/
requestPathToPos(targetPos: Vec3): boolean {
}
/**
* 取得指定索引的节点对应的位置
*/
getNodePos(idx: number): Vec3 {
}
}
目标驱动
资源script/Common/Goals文件夹内,包含了目标驱动使用的基类。目标驱动使用组合设计模式(Composite),Goal、GoalComposite类分别是对单元目标、复合目标的抽象基类。
script/Chapter7_10_Raven/goals文件夹内,包含大量各种目标类型的实现,其中GoalThink类充当了智能体大脑的功能,用于各类目标的仲裁判定。对于目标驱动的使用,可以参考此处的逻辑。
/**
* 目标类型的基类
*/
@ccclass('Goal')
export abstract class Goal<T> {
protected _type: number = -1; // 目标类型
protected _owner: T = null; // 对拥有该目标的实体的引用
protected _state: Goal_State = Goal_State.inactive; // 目标当前状态
constructor(entity: T, type: number) {
this._owner = entity;
this._type = type;
this._state = Goal_State.inactive;
}
get type(): number {
return this._type;
}
/**
* 激活目标处理
*/
abstract activate();
/**
* 更新目标处理
*/
abstract process(): Goal_State;
/**
* 终止目标处理
*/
abstract terminate();
/**
* 渲染目标信息
*/
render() {
}
/**
* 处理消息
*/
handleMessage(msg: Telegram): boolean {
return false;
}
/**
* 增加子目标。该接口默认报错,复合目标会重写该接口
*/
addSubgoal(g: Goal<T>) {
throw new Error(`Cannot add goals to atomic goals`);
}
/**
* 判断目标状态情况的系列接口
*/
isComplete(): boolean {
return this._state == Goal_State.completed;
}
isActive(): boolean {
return this._state == Goal_State.active;
}
isInactive(): boolean {
return this._state == Goal_State.inactive;
}
hasFailed(): boolean {
return this._state == Goal_State.failed;
}
/**
* 如果尚未激活,则调用目标的激活处理接口
*/
protected activateIfInactive() {
if (this.isInactive()) {
this.activate();
}
}
/**
* 如果目标失败了,则设置状态为未激活状态,如此下一帧处理时会自动调用激活接口
*/
protected reactivateIfFailed() {
if (this.hasFailed()) {
this._state = Goal_State.inactive;
}
}
}
/**
* 复合目标的基类
*/
@ccclass('GoalComposite')
export abstract class GoalComposite<T> extends Goal<T> {
protected _subGoals: Array<Goal<T>> = [];
constructor(entity: T, type: number) {
super(entity, type);
}
get frontSubGoal(): Goal<T>|undefined {
return this._subGoals[this._subGoals.length - 1];
}
/**
* 处理子目标
*/
protected processSubgoals(): Goal_State {
// 清理完成、失败的目标
while (this._subGoals.length > 0 &&
(this._subGoals[this._subGoals.length - 1].isComplete() || this._subGoals[this._subGoals.length - 1].hasFailed()))
{
this._subGoals[this._subGoals.length - 1].terminate();
this._subGoals.pop();
}
// 处理最新的目标
if (this._subGoals.length > 0) {
let state = this._subGoals[this._subGoals.length - 1].process();
// 虽然该子目标完成了,但若还有其他子目标,状态需返回为active,以备之后继续处理后面的目标
if (state == Goal_State.completed && this._subGoals.length > 1) {
return Goal_State.active;
}
return state;
} else {
return Goal_State.completed;
}
}
/**
* 传递消息给子目标
*/
protected forwardMsgToSubgoal(msg: Telegram): boolean {
if (this._subGoals.length > 0) {
return this._subGoals[this._subGoals.length - 1].handleMessage(msg);
}
return false;
}
/**
* 处理消息
*/
handleMessage(msg: Telegram): boolean {
return this.forwardMsgToSubgoal(msg);
}
/**
* 添加子目标
*/
addSubgoal(g: Goal<T>) {
this._subGoals.push(g);
}
/**
* 终止目标处理
*/
terminate() {
this.removeAllSubgoals();
}
/**
* 清空所有子目标
*/
removeAllSubgoals() {
for (let i = this._subGoals.length - 1; i >= 0; --i) {
this._subGoals[i].terminate();
}
this._subGoals.length = 0;
}
/**
* 渲染目标信息
*/
render() {
if (this._subGoals.length > 0) {
this._subGoals[this._subGoals.length - 1].render();
}
}
}
// 目标驱动的大脑
@ccclass('GoalThink')
export class GoalThink extends GoalComposite<RavenBot> {
private _evaluators: Array<GoalEvaluator<RavenBot>> = []; // 所有评估目标的列表
constructor(bot: RavenBot) {
super(bot, RavenGoalType.goal_think);
// bot性格偏差随机值范围
const biasMin = 0.5;
const biasMax = 1.5;
// 添加各评估目标
this._evaluators.push(new ExploreEvaluator(Util.getRandomFloat(biasMin, biasMax)));
this._evaluators.push(new PickHealthEvaluator(Util.getRandomFloat(biasMin, biasMax)));
this._evaluators.push(new AttackTargetEvaluator(Util.getRandomFloat(biasMin, biasMax)));
this._evaluators.push(new PickWeaponEvaluator(Util.getRandomFloat(biasMin, biasMax), RavenEntityType.type_shotgun));
this._evaluators.push(new PickWeaponEvaluator(Util.getRandomFloat(biasMin, biasMax), RavenEntityType.type_rail_gun));
this._evaluators.push(new PickWeaponEvaluator(Util.getRandomFloat(biasMin, biasMax), RavenEntityType.type_rocket_launcher));
}
get evaluators(): Array<GoalEvaluator<RavenBot>> {
return this._evaluators;
}
/**
* 激活目标处理
*/
activate() {
this._state = Goal_State.active;
if (!this._owner.isPossessed) {
this.arbitrate();
}
}
/**
* 更新目标处理
*/
process(): Goal_State {
this.activateIfInactive();
let subState = this.processSubgoals();
if (subState == Goal_State.completed || subState == Goal_State.failed) {
if (!this._owner.isPossessed) {
// 成功或失败后,重新评估
this._state = Goal_State.inactive;
}
}
return this._state;
}
/**
* 终止目标处理
*/
terminate() {
super.terminate();
}
/**
* 评估后确定当前的目标
*/
arbitrate() {
let bestDesirability = 0;
let bestEvaluator: GoalEvaluator<RavenBot> = null;
for (let evaluator of this._evaluators) {
let desirability = evaluator.calcDesirability(this._owner);
if (desirability > bestDesirability) {
bestDesirability = desirability;
bestEvaluator = evaluator;
}
}
assert(!!bestEvaluator, "<GoalThink::arbitrate>: no evaluator selected");
bestEvaluator.setGoal(this._owner);
}
/**
* 判断给定目标类型是不是最新的目标
*/
notPresent(goalType: RavenGoalType): boolean {
if (this._subGoals.length > 0) {
return this._subGoals[this._subGoals.length - 1].type != goalType;
}
return true;
}
/**
* 添加获取指定道具的目标
*/
addPickItemGoal(itemType: number) {
if (this.notPresent(itemType2GoalType[itemType])) {
this.removeAllSubgoals();
this.addSubgoal(new GoalPickItem(this._owner, itemType));
}
}
/**
* 添加移动到指定位置的目标
*/
addMoveToPosGoal(pos: Vec3) {
this.addSubgoal(new GoalMoveToPosition(this._owner, pos));
}
/**
* 添加探索地图的目标
*/
addExploreGoal() {
if (this.notPresent(RavenGoalType.goal_explore)) {
this.removeAllSubgoals();
this.addSubgoal(new GoalExplore(this._owner));
}
}
/**
* 添加攻击对象的目标
*/
addAttackTargetGoal() {
if (this.notPresent(RavenGoalType.goal_attack_target)) {
this.removeAllSubgoals();
this.addSubgoal(new GoalAttackTarget(this._owner));
}
}
/**
* 添加移动到指定位置的目标到子目标列表的最前面
*/
queueMoveToPosGoal(pos: Vec3) {
this._subGoals.splice(0, 0, new GoalMoveToPosition(this._owner, pos));
}
/**
* 渲染目标信息
*/
render() {
for (let goal of this._subGoals) {
goal.render();
}
}
}
触发器
资源script/Common/Triggers文件夹内,包含了游戏内常用触发器的实现类。通过继承这些类,可以实现项目内需要的各类触发器行为。
-
TriggerSystem < T>类,指定类型T对应触发器的管理系统,管理所有T类型相关的触发器。Raven游戏内,地图RavenMap对象,包含了该类的实例。
-
Trigger < T>类,触发器类型的抽象基类
-
TriggerLimitedLifeTime < T>类,有生命时长的触发器类型的抽象基类。Raven游戏内的武器声音传播触发器,是其子类实现。
-
TriggerRespawning < T>类,可在失活一定时间后,自动激活的触发器类型的抽象基类。Raven游戏内的回血道具触发器,是其子类实现。
-
TriggerRegionCircle、TriggerRegionRectangle类,触发器使用的圆型、方形触发区域类。
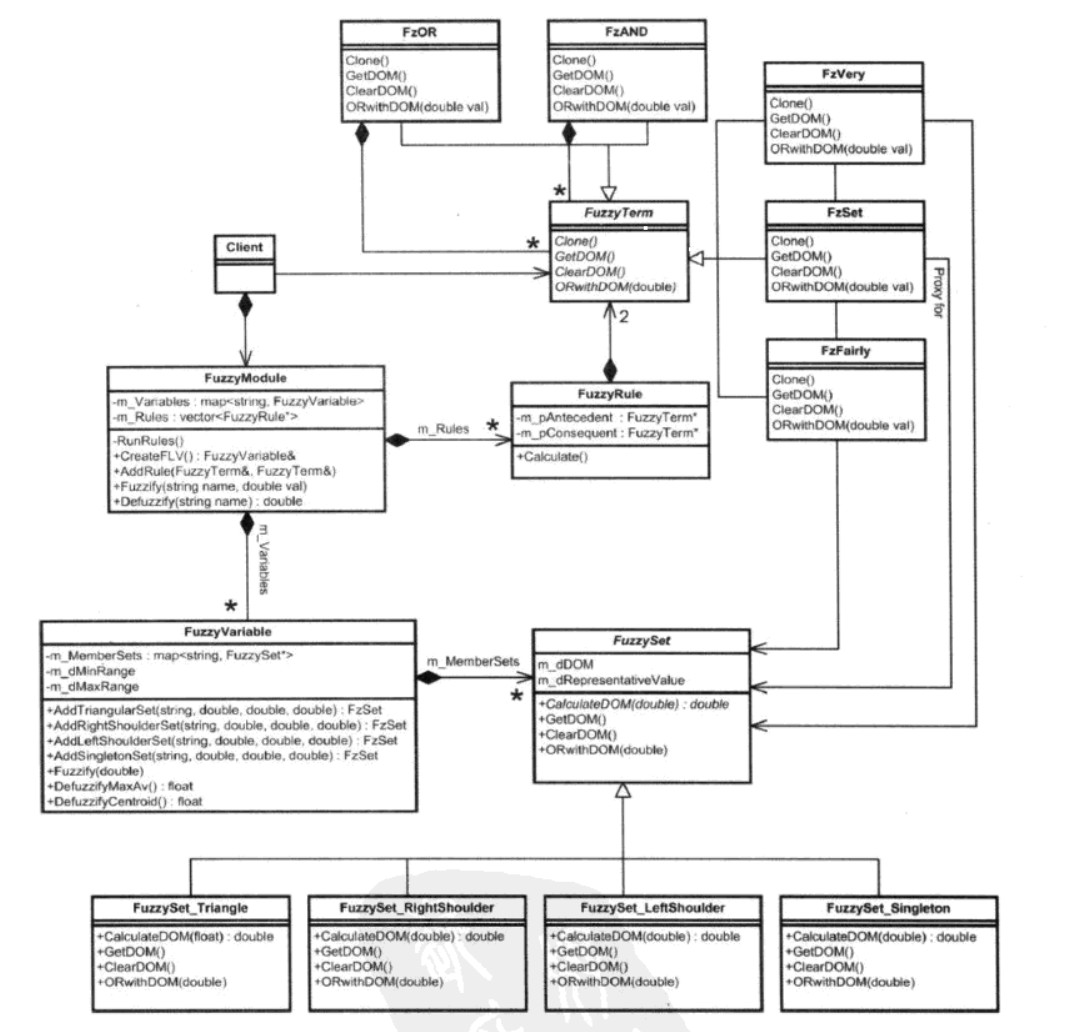
模糊逻辑
Raven游戏使用模糊逻辑,来选择当前最适合的武器。模糊逻辑可以被应用在游戏的方方面面,比如选择合适的释放技能种类、选择合适的态度面对敌对势力、选择适合当前的发展方向等等。
资源script/Common/Fuzzy文件夹内,包含了模糊逻辑实现中常用的类型。
-
FuzzyModule类是模糊逻辑的总控制室,用于模糊处理、去模糊化。为项目内需要模糊逻辑的实体,创建一个该类型的实例。
-
FuzzyVariable类是模糊语言变量类,包含需要用到的模糊集合列表。
-
FuzzySet、FuzzySetTriangle、FuzzySetSingleton、FuzzySetLeftShoulder、FuzzySetRightShoulder是各种类型的模糊集合类
-
FuzzyTerm类是模糊条件的基类,抽象出了作为操作数、运算符都需要实现的接口
-
FzVery、FzFairyly是模糊规则用操作数类型
-
FzAND、FzOR是模糊规则用运算符类型
-
FzSet类是模糊集合的代理
-
FuzzyRule类是模糊规则类,包含模糊规则需要的条件和结果
资源script/Chapter7_10_Raven/armory文件夹内,包含了智能体怎么使用模糊逻辑,选择合适武器的实现代码,可用于模糊逻辑的使用参考。
本项目已在 Cocos Store 上架,您可以通过以下链接购买获取全部完整源码与工程文件。
为什么选择购买而非自己从头实现?
我们理解每一位开发者都有动手实现的冲动。但如果您正致力于实际项目开发或希望高效学习,本项目将成为您的终极加速器:
-
节省大量时间:本项目包含10+个核心AI案例,从环境配置到完美移植,自己实现需要耗费数周甚至数月的业余时间。而您只需一顿饭的费用(现仅需50元),即可立即获得所有这些时间,投入到更重要的创意工作中去。
-
获得最佳实践:这不仅仅是一份代码,更是一个高质量、可复用的代码库。您从中学习到的Cocos工程架构、TypeScript设计和算法实现方式,价值远超定价。
-
投资未来:您的支持将直接帮助开发者(也就是我)持续进行维护更新,并投入到新游戏的研发中。您不仅是购买一个产品,更是在支持一位独立开发者的梦想。
限时优惠:感谢Cocos官方推荐,特此推出限时优惠价(现价49.8元,原价99元),优惠将持续到8月31日。如果您需要,现在就是最好的入手时机。
Cocos官方推荐文章链接

 ,休息时间学习一下
,休息时间学习一下