
重要
重要事情要放在前边说:菜鸟使用的图库出现了点问题,导致菜鸟在社区中发表的文章配图都丢失了,菜鸟已经紧急修复了一波,但奈何之前比较久的文章已经无法进行修改,大家可以关注菜鸟的公众号,或者CSDN:搬砖小菜鸟来浏览之前的文章,菜鸟假期会抽时间将所有出问题的文章整理出来汇总一下。
前沿
今天菜鸟和大家一起来讨论一下3D入门的基础性知识:Mesh。
它是3D模型能正常展现的重要因素
上边这个小姐姐模型,大家想知道它是怎么构成的吗?今天菜鸟带大家了解一下3D模型组成之顶点数据,uv数据,法线数据等一系类数据。
·以下所有内容都是基于Cococ Creator3.x 进行介绍
数据结构
首先,咱们基于Cococ Creator3.x中几何体信息的数据结构来了解一下一个普通的Mesh中到底有那个数据:
export interface IGeometry {
positions: number[];
normals?: number[];
uvs?: number[];
tangents?: number[];
colors?: number[];
attributes?: gfx.Attribute[];
customAttributes?: {
attr: gfx.Attribute;
values: number[];
}[];
boundingRadius?: number;
minPos?:{x: number;y: number;z: number;};
maxPos?: {x: number;y: number;z: number;};
indices?: number[];
primitiveMode?: gfx.PrimitiveMode;
doubleSided?: boolean;
}
上边的数据结构菜鸟是直接从引擎代码拷贝过来的,其实从字面意思也可以理解到其中包含了:顶点,法线,uv切线,顶点颜色,索引,包围盒坐标等一系类数据
数据解析
关键的来了,下边菜鸟就会对以上主要的的数据结构进行解释,大家自己看了奥。
1.顶点positions
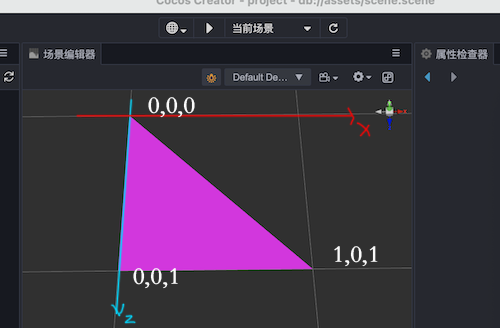
大家可能都知道,一个网格体(Mesh)是由多个彼此相连的三角面组成,而三角面则是由三个顶点组成,就比如一个简单的平面,大家看一下下边的图:
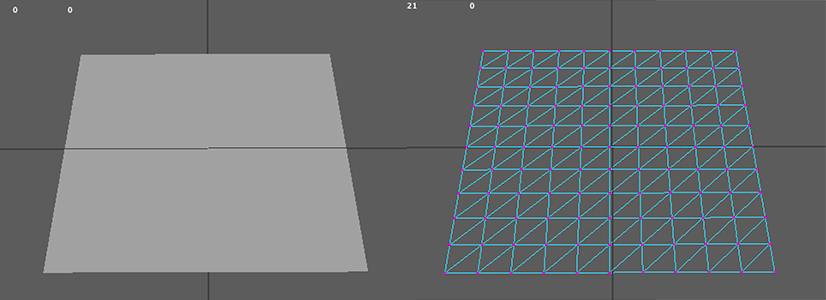
所以顶点数据决定了网格体的基本形状。
下面菜鸟通过顶点数据创建一个简单的三角形:
let point = [
0, 0, 0, //点1 x,y,z
0, 0, 1, //点2 x,y,z
1, 0, 1 //点3 x,y,z
];
let mesh = utils.createMesh({
positions:point
});
通过上边的代码,我们就可以创建一个简单的三角形,我们需要注意的是:
- 1.positions 是一个数字类型的数组,
- 2.每3个数据组成一个点,分别表示x,y,z
- 3.每3个点组成一个面
- 4.组成面的3个应是逆时针方向
2.uv
uv实际上是u,v纹理贴图的坐标简称,所有的图像文件都是二维的一个平面,水平方向是u,垂直方向是v。UV就是将图像上每一个点精确对应到模型物体的表面.在点与点之间的间隙位置由软件进行图像光滑插值处理。
接下来咱们简单介绍一下uv坐标的原理:
在cocos 中uv的分布是这样的:
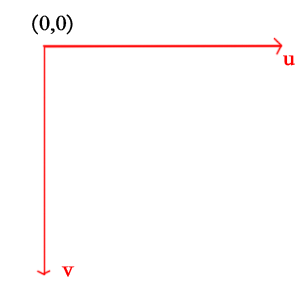
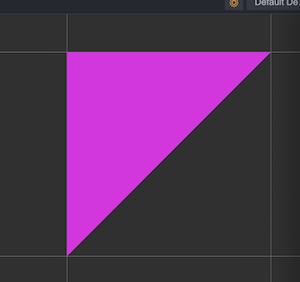
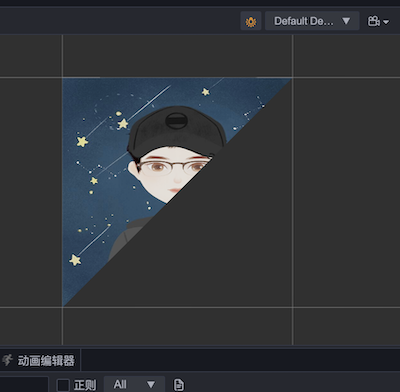
左上角为(0,0)点,那么对于下边的三角形:
我们已知三个顶点分别是:
let point = [
0, 0, 0, //点1 x,y,z
0, 0, 1, //点2 x,y,z
1, 0, 0, //点3 x,y,z
];
我们需要将顶点坐标和uv坐标相对应,为顶点设置对应uv的坐标:
let uvs=[
0,0, //对应第一个顶点
0,1, //第二个顶点
1,0, //第三个顶点
];
最终的效果就是这样
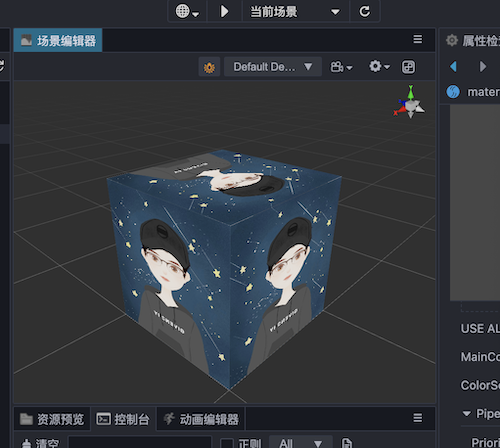
在看看咱们的立方体
3.法线normals
法线:它是一个向量,和uv一样,他都属于顶点的属性,那么他的数量和uv一样都是与顶点一一对应的。在网格中,法线通常被用来进行光照效果的计算,同时在一些自定义的材质中也会用到发现去实现一些效果
let point = [
0, 0, 0, //点1 x,y,z
0, 0, 1, //点2 x,y,z
1, 0, 0, //点3 x,y,z
1, 0, 0, //点3 x,y,z
0, 0, 1, //点2 x,y,z
1, 0, 1,
];
let uvs = [
0, 0,
0, 1,
1, 0,
1, 0,
0, 1,
1, 1,
];
let normals = [
0, 1, 0,
0, 1, 0,
0, 1, 0,
0, 1, 0,
0, 1, 0,
0, 1, 0,
];
let mesh = utils.createMesh({
positions: point,
uvs: uvs,
normals: normals,
});
4.索引indices
接下来咱们说说索引,索引到底是干什么用的呢,下边咱们用一个立方体来给大家展示一下:
在给大家看看代码:
let point = [
//bottom
0, 0, 0, 0, 0, 1, 1, 0, 0,
1, 0, 0, 0, 0, 1, 1, 0, 1,
//top
0, 1, 0, 0, 1, 1, 1, 1, 0,
1, 1, 0, 0, 1, 1, 1, 1, 1,
//left
0, 0, 0, 0, 0, 1, 0, 1, 0,
0, 1, 0, 0, 0, 1, 0, 1, 1,
//right
1, 0, 0, 1, 0, 1, 1, 1, 0,
1, 1, 0, 1, 0, 1, 1, 1, 1,
//back
0, 0, 0, 1, 0, 0, 0, 1, 0,
0, 1, 0, 1, 0, 0, 1, 1, 0,
//front
0, 0, 1, 1, 0, 1, 0, 1, 1,
0, 1, 1, 1, 0, 1, 1, 1, 1,
];
let mesh = utils.createMesh({
positions: point
});
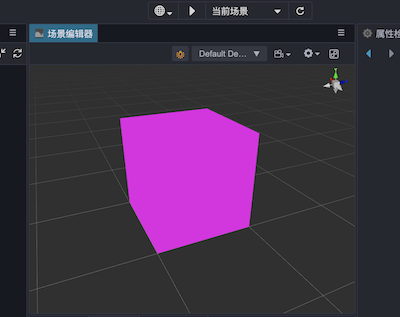
一个立方体6个面。一个面最少两个三角形,那么就是6个顶点。6个面36个顶点,但是仔细的小伙伴会发现有好多点时重复出现的,那么有一种方式可以避免顶点的重复出现嘛,答案当然是有的,就是咱们要说的索引。
索引的原理就是positions中的坐标点都是唯一的,通过索引来代替重复的点,直接看使用吧:
let point = [
0, 0, 0, //0
0, 0, 1, //1
1, 0, 0, //2
1, 0, 1, //3
0, 1, 0, //4
1, 1, 0, //5
0, 1, 1, //6
1, 1, 1, //7
];
let indices = [
//bottom
0, 1, 2,
2, 1, 3,
//top
4,6,5,
5,6,7,
//left
0,1,4,
4,1,6,
//right
2,3,5,
5,3,7,
//back
0,2,4,
4,2,5,
//front
1,3,6,
6,3,7,
];
let mesh = utils.createMesh({
positions: point,
indices:indices,
});
需要注意的是,position中每三个值代表一组,也就是一个坐标点,uv中每两个值代表一个坐标点,indices中的值代表的是position,uv中的第几个坐标点,而不是直观的下标。
利用索引,咱们就可以将position中的重复点优化掉,通过索引来控制,
作为顶点属性的uv和法线,以至于顶点颜色都会同时也会受到索引的影响,也就是索引同时控制了顶点以及uv和法线
简单的屏面:
let point = [
0, 0, 0,
0, 0, 1,
1, 0, 0,
1, 0, 1,
];
let uvs = [
0, 0,
0, 1,
1, 0,
1, 1,
];
let normals = [
0, 1, 0,
0, 1, 0,
0, 1, 0,
0, 1, 0,
];
let indices = [
0, 1, 2, 2, 1, 3
];
let mesh = utils.createMesh({
positions: point,
uvs: uvs,
normals: normals,
indices: indices,
});
5.minPos,maxPos
minPos,maxPos 字面意思就是最大点和最小点,那么什么是最大点和最小点呢?
先看看源码:
let minPosition = geometry.minPos;
if (!minPosition && options.calculateBounds) {
minPosition = Vec3.set(new Vec3(), Infinity, Infinity, Infinity);
for (let iVertex = 0; iVertex < vertCount; ++iVertex) {
Vec3.set(v3_1, positions[iVertex * 3 + 0], positions[iVertex * 3 + 1], positions[iVertex * 3 + 2]);
Vec3.min(minPosition, minPosition, v3_1);
}
}
let maxPosition = geometry.maxPos;
if (!maxPosition && options.calculateBounds) {
maxPosition = Vec3.set(new Vec3(), -Infinity, -Infinity, -Infinity);
for (let iVertex = 0; iVertex < vertCount; ++iVertex) {
Vec3.set(v3_1, positions[iVertex * 3 + 0], positions[iVertex * 3 + 1], positions[iVertex * 3 + 2]);
Vec3.max(maxPosition, maxPosition, v3_1);
}
}
通过模型的顶点数据,计算顶点中x,y,z三个方向同时最小和最大的坐标,通过最大点和 最小点可以模拟出一个将整个模型包含在内的矩形来,也就是咱们所说的包围盒
至于包围盒的作用,首相想到的就是谁相机对物体的剔除,也上一段源码吧
if (model.node && ((visibility & model.node.layer) === model.node.layer)
|| (visibility & model.visFlags)) {
// shadow render Object
if (dirShadowObjects != null && model.castShadow && model.worldBounds) {
// frustum culling
if (shadows.fixedArea) {
AABB.transform(_ab, model.worldBounds, shadows.matLight);
if (intersect.aabbFrustum(_ab, camera.frustum)) {
dirShadowObjects.push(getDirShadowRenderObject(model, camera));
}
} else {
// eslint-disable-next-line no-lonely-if
if (intersect.aabbFrustum(model.worldBounds, _dirLightFrustum)) {
dirShadowObjects.push(getDirShadowRenderObject(model, camera));
}
}
}
// frustum culling
if (model.worldBounds && !intersect.aabbFrustum(model.worldBounds, camera.frustum)) {
continue;
}
renderObjects.push(getRenderObject(model, camera));
}
同时一直有一个问题,在原生平台进行静态合批后,网格的包围盒貌似有问题,场景中的模型剔除会出现异常
实操
上面说了这么多,那么在实际开发中都会有哪些操作呢?
1.NavMesh 数据
顺带在这里给自己的导航寻路打个广告导航寻路
在集成NavMesh时,最长见的需求就是:我的场景中存在好多子物体,有从外部导入的,也有用引擎自带的,在构建导航数据之前我们需要将这些子物体进行网格数据的整理
public addStaticModle (node: Node): void;
我们只需要拿到顶点,索引就可以进行数据整理
let position = mesh.readAttribute(0, gfx.AttributeName.ATTR_POSITION);
let indices = [];
mesh.copyIndices(0, indices);
接下来的大家可以去菜鸟的寻路源码中了解奥
2.mesh数据导出obj
需求永远是那么的奇怪!
在一个比较大的游戏场景中
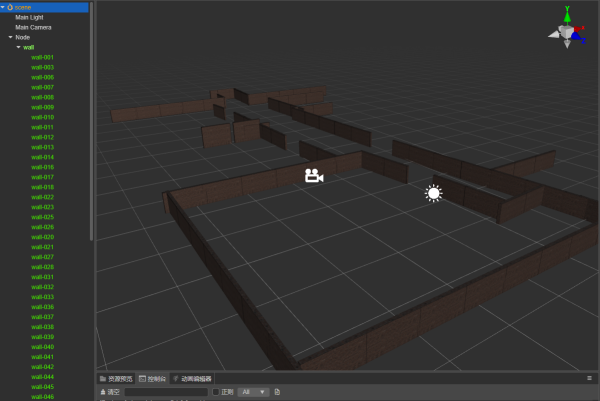
会出现使用大量的相同物体取拼凑出一个布局来,那么一个场景中可能会出现大量的节点个数,节点数量过多会导致一写性能问题,比如序列化慢等,
平时我们都是用三方软件建好模型,导入到编辑器中,那么反之是不是可以将我们场景中的模型导出为三方软件识别的模型文件,
答案肯定是可以的
- 首先OBJ文件是一种文本文件,文本编辑器打开就可以看见内容,而且大多数建模软件都可以打开
v 0.123 0.234 0.345 1.0
v ...
vt 0.500 1 [0]
vt ...
vn 0.707 0.000 0.707
vn ...
f 3/1 4/2 5/3
f 6/4/1 3/5/3 7/6/5
f 7//1 8//2 9//3
f ..
- 我们我可拿到场景中网格的基本数据
let positions = mesh.readAttribute(0, gfx.AttributeName.ATTR_POSITION);
let normals = mesh.readAttribute(0, gfx.AttributeName.ATTR_NORMAL);
let uvs = mesh.readAttribute(0, gfx.AttributeName.ATTR_TEX_COORD);
let indices = mesh.readIndices(0);
菜鸟整理了一下,通过一个简单的脚本对所有的子物体先进行了网格数据的合并,然后点击保存数据将网格数据导出为obj
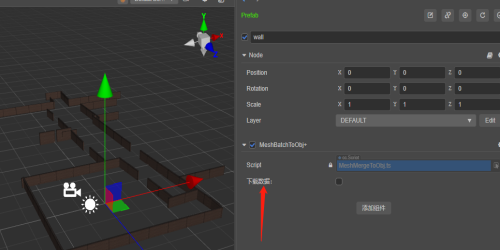
![]()
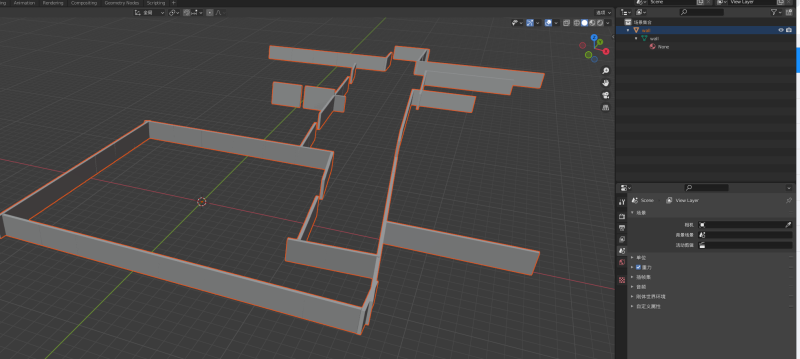
源码
源码已上传至商店,链接:https://store.cocos.com/app/detail/3666, 或者大家直接搜Mesh 导出 obj 3D模型感兴趣的小伙伴可以去看看



